
ąÆ čĆčāą▒čĆąĖą║čā "ąĀąĄčłąĄąĮąĖčÅ ą║ąŠčĆą┐ąŠčĆą░čéąĖą▓ąĮąŠą│ąŠ ą║ą╗ą░čüčüą░" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣

ąōčĆąĖą│ąŠčĆąĖą╣ ą¤čĆą░čüčīą║ąŠ
ąÉą┤čīčÄąĮą║čé, ąÆąŠąĄąĮąĮą░čÅ ą░ą║ą░ą┤ąĄą╝ąĖčÅ čüą▓čÅąĘąĖ

ąÆąĖą║č鹊čĆ ąĪąĮąĄąČą║ąŠ
ąöąŠčåąĄąĮčé, ą║ą░ąĮą┤ąĖą┤ą░čé č鹥čģąĮąĖč湥čüą║ąĖčģ ąĮą░čāą║, ąÆąŠąĄąĮąĮą░čÅ ą░ą║ą░ą┤ąĄą╝ąĖčÅ čüą▓čÅąĘąĖ
 ą¤čĆąĖ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĖ čāčüą╗čāą│ąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą┐ąĄčĆą░č鹊čĆą░ą╝ąĖ čüąĄč鹥ą╣ čüčāčģąŠą┐čāčéąĮąŠą╣ ą┐ąŠą┤ą▓ąĖąČąĮąŠą╣ čĆą░ą┤ąĖąŠčüą▓čÅąĘąĖ (ąĪąĪą¤ąĀ) ą▓ąŠąĘąĮąĖą║ą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ č鹥čĆčĆąĖč鹊čĆąĖąĖ, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ą▒čāą┤ąĄčé čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčīčüčÅ čéčĆąĄą▒čāąĄą╝ąŠąĄ ą║ą░č湥čüčéą▓ąŠ ą┤ą░ąĮąĮąŠą╣ čāčüą╗čāą│ąĖ, ą┐čĆąĄąČą┤ąĄ ą▓čüąĄą│ąŠ ą┐ąŠ č鹊čćąĮąŠčüčéąĖ. ą×ą┐ąĄčĆą░č鹊čĆ ąĖ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čī ą┤ąŠą╗ąČąĮčŗ ąĘąĮą░čéčī, čü ą║ą░ą║ąĖą╝ ą║ą░č湥čüčéą▓ąŠą╝ ąĖ ąĮą░ ą║ą░ą║ąŠą╣ č鹥čĆčĆąĖč鹊čĆąĖąĖ ą┤ą░ąĮąĮą░čÅ čāčüą╗čāą│ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ. ążąŠčĆą╝ą░ ąĖ čĆą░ąĘą╝ąĄčĆčŗ č鹥čĆčĆąĖč鹊čĆąĖąĖ, ą┐ąŠą╗čāčćąĖą▓čłąĄą╣ ąĮą░ąĘą▓ą░ąĮąĖąĄ čĆą░ą▒ąŠč湥ą╣ ąĘąŠąĮčŗ, ąĘą░ą▓ąĖčüčÅčé ąŠčé 菹ĮąĄčĆą│ąĄčéąĖą║ąĖ čĆą░ą┤ąĖąŠą╗ąĖąĮąĖą╣ ąĖ ą│ąĄąŠą╝ąĄčéčĆąĖąĖ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▒ą░ąĘąŠą▓čŗčģ čüčéą░ąĮčåąĖą╣ (ąæąĪ), ąĖą│čĆą░čÄčēąĖčģ čĆąŠą╗čī ąŠą┐ąŠčĆąĮčŗčģ čüčéą░ąĮčåąĖą╣ (ą×ąĪ) ą┐čĆąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĖ.
ą¤čĆąĖ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĖ čāčüą╗čāą│ąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą┐ąĄčĆą░č鹊čĆą░ą╝ąĖ čüąĄč鹥ą╣ čüčāčģąŠą┐čāčéąĮąŠą╣ ą┐ąŠą┤ą▓ąĖąČąĮąŠą╣ čĆą░ą┤ąĖąŠčüą▓čÅąĘąĖ (ąĪąĪą¤ąĀ) ą▓ąŠąĘąĮąĖą║ą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ č鹥čĆčĆąĖč鹊čĆąĖąĖ, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ą▒čāą┤ąĄčé čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčīčüčÅ čéčĆąĄą▒čāąĄą╝ąŠąĄ ą║ą░č湥čüčéą▓ąŠ ą┤ą░ąĮąĮąŠą╣ čāčüą╗čāą│ąĖ, ą┐čĆąĄąČą┤ąĄ ą▓čüąĄą│ąŠ ą┐ąŠ č鹊čćąĮąŠčüčéąĖ. ą×ą┐ąĄčĆą░č鹊čĆ ąĖ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čī ą┤ąŠą╗ąČąĮčŗ ąĘąĮą░čéčī, čü ą║ą░ą║ąĖą╝ ą║ą░č湥čüčéą▓ąŠą╝ ąĖ ąĮą░ ą║ą░ą║ąŠą╣ č鹥čĆčĆąĖč鹊čĆąĖąĖ ą┤ą░ąĮąĮą░čÅ čāčüą╗čāą│ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ. ążąŠčĆą╝ą░ ąĖ čĆą░ąĘą╝ąĄčĆčŗ č鹥čĆčĆąĖč鹊čĆąĖąĖ, ą┐ąŠą╗čāčćąĖą▓čłąĄą╣ ąĮą░ąĘą▓ą░ąĮąĖąĄ čĆą░ą▒ąŠč湥ą╣ ąĘąŠąĮčŗ, ąĘą░ą▓ąĖčüčÅčé ąŠčé 菹ĮąĄčĆą│ąĄčéąĖą║ąĖ čĆą░ą┤ąĖąŠą╗ąĖąĮąĖą╣ ąĖ ą│ąĄąŠą╝ąĄčéčĆąĖąĖ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▒ą░ąĘąŠą▓čŗčģ čüčéą░ąĮčåąĖą╣ (ąæąĪ), ąĖą│čĆą░čÄčēąĖčģ čĆąŠą╗čī ąŠą┐ąŠčĆąĮčŗčģ čüčéą░ąĮčåąĖą╣ (ą×ąĪ) ą┐čĆąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĖ.
ąÆą╗ąĖčÅąĮąĖąĄ 菹ĮąĄčĆą│ąĄčéąĖą║ąĖ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąŠ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ čĆą░ą▒ąŠč鹥 ą░ą▓č鹊čĆąŠą▓ (ąĪąĮąĄąČą║ąŠ ąÆ.ąÜ., ą¤čĆą░čüčīą║ąŠ ąō.ąÉ. ą× čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮą░čģ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ ąĪąĪą¤ąĀ // ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ąĖ čüčĆąĄą┤čüčéą▓ą░ čüą▓čÅąĘąĖ. 2008. Ōä¢ 4). ąÆ ą┤ą░ąĮąĮąŠą╣ čüčéą░čéčīąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▓ą╗ąĖčÅąĮąĖčÅ ą│ąĄąŠą╝ąĄčéčĆąĖąĖ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą×ąĪ ą┐ąŠčüčĆąĄą┤čüčéą▓ąŠą╝ čéą░ą║ąĖčģ čłąĖčĆąŠą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓ čĆą░ą┤ąĖąŠąĮą░ą▓ąĖą│ą░čåąĖąĖ ą┐ąŠąĮčÅčéąĖą╣, ą║ą░ą║ ą│ąĄąŠą╝ąĄčéčĆąĖč湥čüą║ąĖą╣ čäą░ą║č鹊čĆ (ąōąż) ąĖ čĆą░ą▒ąŠčćą░čÅ ąĘąŠąĮą░ (ąĀąŚ).
 ąĀą░ą▒ąŠčćą░čÅ ąĘąŠąĮą░ čüąĖčüč鹥ą╝čŗ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĪąĪą¤ąĀ ąĄčüčéčī čāčćą░čüč鹊ą║ ąĘąĄą╝ąĮąŠą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ąŠą┐ąĄčĆą░č鹊čĆ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé čāčüą╗čāą│čā ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čéčĆąĄą▒čāąĄą╝ąŠą│ąŠ ą║ą░č湥čüčéą▓ą░ ą┐ąŠ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé. ąĀą░ąĘą╝ąĄčĆčŗ ąĄąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┐čāč鹥ą╝ č鹊čćąĮąŠą│ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░ą┤ąĖąŠąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄą╝ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąōąż, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčéčüčÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ ąĖą╗ąĖ ąĘą░ą║ą░ąĘčćąĖą║ą░ ą┐ąŠ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░:
ąĀą░ą▒ąŠčćą░čÅ ąĘąŠąĮą░ čüąĖčüč鹥ą╝čŗ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĪąĪą¤ąĀ ąĄčüčéčī čāčćą░čüč鹊ą║ ąĘąĄą╝ąĮąŠą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ąŠą┐ąĄčĆą░č鹊čĆ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé čāčüą╗čāą│čā ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čéčĆąĄą▒čāąĄą╝ąŠą│ąŠ ą║ą░č湥čüčéą▓ą░ ą┐ąŠ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé. ąĀą░ąĘą╝ąĄčĆčŗ ąĄąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┐čāč鹥ą╝ č鹊čćąĮąŠą│ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░ą┤ąĖąŠąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄą╝ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąōąż, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčéčüčÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ ąĖą╗ąĖ ąĘą░ą║ą░ąĘčćąĖą║ą░ ą┐ąŠ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░:

ą│ą┤ąĄ σ*iÏ - čéčĆąĄą▒čāąĄą╝ąŠąĄ čüčĆąĄą┤ąĮąĄą║ą▓ą░ą┤čĆą░čéąĖč湥čüą║ąŠąĄ ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ ą┐ąŠą│čĆąĄčłąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░; σiÏ - čüčĆąĄą┤ąĮąĄą║ą▓ą░ą┤čĆą░čéąĖč湥čüą║ąŠąĄ ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ ą┐ąŠą│čĆąĄčłąĮąŠčüčéąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓.
ąŻ ąĘą░ą║ą░ąĘčćąĖą║ąŠą▓ čŹčéąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ąŠčéą╗ąĖčćą░čéčīčüčÅ, ą┐ąŠčŹč鹊ą╝čā ąĘąĮą░č湥ąĮąĖčÅ ąōąż ąĖ čĆą░ąĘą╝ąĄčĆčŗ ąĀąŚ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░ąĘąĮčŗą╝ąĖ. ąÆą░ąČąĮąŠ ąĘąĮą░čéčī, ąŠčé č湥ą│ąŠ ąŠąĮąĖ ąĘą░ą▓ąĖčüčÅčé, ąŠ č湥ą╝ ą▒čāą┤ąĄčé čüą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ.
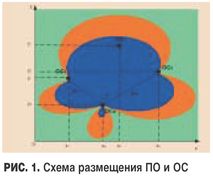
ąÆ ąĪąĪą¤ąĀ, ą║ą░ą║ ąĖ ą▓ąŠąŠą▒čēąĄ ą▓ čĆą░ą┤ąĖąŠąĮą░ą▓ąĖą│ą░čåąĖąĖ, čłąĖčĆąŠą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆą░ąĘąĮąŠčüčéąĮąŠ-ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮčŗą╣ ą╝ąĄč鹊ą┤ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░ ąĮą░ ąĘąĄą╝ąĮąŠą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ. ą¤čĆąĖ ą┤ą░ąĮąĮąŠą╝ ą╝ąĄč鹊ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čéčĆąĖ ą×ąĪ: ą×ąĪąÆ - ą▓ąĄą┤čāčēą░čÅ ą×ąĪ, ą×ąĪ1 ąĖ ą×ąĪ2 - ą▓ąĄą┤ąŠą╝čŗąĄ ą×ąĪ (čĆąĖčü. 1). ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĮą░ čĆąĖčü. 1 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ąĀąŚ ą┤ą╗čÅ ąōąż, čĆą░ą▓ąĮąŠą│ąŠ 5 (čüąĖąĮąĄą│ąŠ čåą▓ąĄčéą░) ąĖ 10 (ąŠčĆą░ąĮąČąĄą▓ąŠą│ąŠ čåą▓ąĄčéą░). ąśąĘ čĆąĖčüčāąĮą║ą░ čéą░ą║ąČąĄ ą▓ąĖą┤ąĮąŠ, čćč鹊 čü čāą▓ąĄą╗ąĖč湥ąĮąĖąĄą╝ ąōąż čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąĖ ąĀąŚ, ąĮąŠ ą┐čĆąĖ čŹč鹊ą╝, ą║ą░ą║ čüą╗ąĄą┤čāąĄčé ąĖąĘ (1), čüąĮąĖąČą░ąĄčéčüčÅ č鹊čćąĮąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░, č鹊 ąĄčüčéčī σ*iÏ ą▓ąŠąĘčĆą░čüčéą░ąĄčé.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čĆą░ąĘą╝ąĄčĆ čĆą░ą▒ąŠč湥ą╣ ąĘąŠąĮčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą│ąĄąŠą╝ąĄčéčĆąĖč湥čüą║ąĖą╝ čäą░ą║č鹊čĆąŠą╝, ą║ąŠč鹊čĆčŗą╣ ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī ąĘą░ą▓ąĖčüąĖčé ąŠčé čāą│ą╗ąŠą▓ ą╝ąĄąČą┤čā ą▒ą░ąĘą░ą╝ąĖ Φ ą┐čĆąĖ ąĘą░ą┤ą░ąĮąĮąŠą╝ ąĘąĮą░č湥ąĮąĖąĖ ą▒ą░ąĘ b1ą▓ ąĖ b2ą▓.
 ąÆ ą┐čĆąŠčåąĄčüčüąĄ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖą╣ ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą╝ąĄč鹊ą┤ąĖą║ą░ ąĖ čĆą░ą▒ąŠčćą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čĆą░čüč湥čéą░ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą│čĆą░ą┤ąĖąĄąĮčéąĮąŠą╣ ą╝ą░čéčĆąĖčåčŗ. ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ ą╝ąĄč鹊ą┤ąĖą║ąĖ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ č鹊ą╝, čćč鹊 ąŠąĮą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░čüčüčćąĖčéčŗą▓ą░čéčī čĆą░ą▒ąŠčćąĖąĄ ąĘąŠąĮčŗ ąĖ ąĖčģ ą┐ą╗ąŠčēą░ą┤ąĖ ą┐čĆąĖ ą╗čÄą▒ąŠą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ą×ąĪ ąĖ ą╗čÄą▒ąŠą╣ ąĖčģ č鹊ą┐ąŠą╗ąŠą│ąĖąĖ. ąĀą░čüč湥čéčŗ ą┐čĆąŠą▓ąĄą┤ąĄąĮčŗ ą┤ą╗čÅ čüąŠčéčŗ ą▓ąĄą┤čāčēąĄą╣ čüčéą░ąĮčåąĖąĖ, ą▓ ą┤čĆčāą│ąĖčģ čüąŠčéą░čģ čüąĖčéčāą░čåąĖąĖ ą▒čāą┤čāčé ą┐ąŠą▓č鹊čĆčÅčéčīčüčÅ. ą£ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą×ąĪąÆ ąĘą░ą┤ą░ą▓ą░ą╗ąŠčüčī čüą╗čāčćą░ą╣ąĮąŠ ą▓ ą┤ąĄą║ą░čĆč鹊ą▓ąŠą╣ čüąĖčüč鹥ą╝ąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé, ą┐ąŠčüą║ąŠą╗čīą║čā čĆą░ąĘą╝ąĄčĆčŗ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ ąĮąĄ ąĘą░ą▓ąĖčüčÅčé ąŠčé ą║ąŠąŠčĆą┤ąĖąĮą░čé ąĄąĄ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ. ą¤ąŠčŹč鹊ą╝čā ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓čŗ ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą×ąĪąÆ.
ąÆ ą┐čĆąŠčåąĄčüčüąĄ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖą╣ ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą╝ąĄč鹊ą┤ąĖą║ą░ ąĖ čĆą░ą▒ąŠčćą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čĆą░čüč湥čéą░ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą│čĆą░ą┤ąĖąĄąĮčéąĮąŠą╣ ą╝ą░čéčĆąĖčåčŗ. ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ ą╝ąĄč鹊ą┤ąĖą║ąĖ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ č鹊ą╝, čćč鹊 ąŠąĮą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░čüčüčćąĖčéčŗą▓ą░čéčī čĆą░ą▒ąŠčćąĖąĄ ąĘąŠąĮčŗ ąĖ ąĖčģ ą┐ą╗ąŠčēą░ą┤ąĖ ą┐čĆąĖ ą╗čÄą▒ąŠą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ą×ąĪ ąĖ ą╗čÄą▒ąŠą╣ ąĖčģ č鹊ą┐ąŠą╗ąŠą│ąĖąĖ. ąĀą░čüč湥čéčŗ ą┐čĆąŠą▓ąĄą┤ąĄąĮčŗ ą┤ą╗čÅ čüąŠčéčŗ ą▓ąĄą┤čāčēąĄą╣ čüčéą░ąĮčåąĖąĖ, ą▓ ą┤čĆčāą│ąĖčģ čüąŠčéą░čģ čüąĖčéčāą░čåąĖąĖ ą▒čāą┤čāčé ą┐ąŠą▓č鹊čĆčÅčéčīčüčÅ. ą£ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą×ąĪąÆ ąĘą░ą┤ą░ą▓ą░ą╗ąŠčüčī čüą╗čāčćą░ą╣ąĮąŠ ą▓ ą┤ąĄą║ą░čĆč鹊ą▓ąŠą╣ čüąĖčüč鹥ą╝ąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé, ą┐ąŠčüą║ąŠą╗čīą║čā čĆą░ąĘą╝ąĄčĆčŗ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ ąĮąĄ ąĘą░ą▓ąĖčüčÅčé ąŠčé ą║ąŠąŠčĆą┤ąĖąĮą░čé ąĄąĄ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ. ą¤ąŠčŹč鹊ą╝čā ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓čŗ ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą×ąĪąÆ.
ą¤ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮąŠą╣ ą╝ąĄč鹊ą┤ąĖą║ąĄ ą┐čĆąŠą▓ąŠą┤ąĖą╗ąĖčüčī ą▓čüąĄ čĆą░čüč湥čéčŗ ąĀąŚ. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠą╣ ą┐ą╗ąŠčēą░ą┤ąĖ ąĀąŚ × S/Smax ąŠčé čāą│ą╗ą░ Φ ą┤ą╗čÅ ąōąż, čĆą░ą▓ąĮąŠą│ąŠ 2, 3, 5, 10, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ąĮą░ čĆąĖčü. 2. ąŚą┤ąĄčüčī S ąĄčüčéčī ą┐ą╗ąŠčēą░ą┤čī čĆą░ą▒ąŠč湥ą╣ ąĘąŠąĮčŗ ą┤ą╗čÅ ą┤ą░ąĮąĮąŠą│ąŠ čāą│ą╗ą░, čä, ą░ Smax - ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ą╗ąŠčēą░ą┤ąĖ ąĀąŚ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ Φ ąŠčé 0 ą┤ąŠ 180 ą│čĆą░ą┤čāčüąŠą▓. ąŻą│ąŠą╗ Φ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ Smax, ąŠą▒ąŠąĘąĮą░č湥ąĮ Φmą░čģ. ąÉąĮą░ą╗ąĖąĘ ą│čĆą░čäąĖą║ąŠą▓ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 Φmą░čģ ąĮąĄ ąŠčüčéą░ąĄčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮčŗą╝ ąĖ ą▓ąŠąĘčĆą░čüčéą░ąĄčé čü čĆąŠčüč鹊ą╝ ąōąż. ą¤čĆąĖ ą╝ą░ą╗čŗčģ ąĘąĮą░č湥ąĮąĖčÅčģ ąōąż (2, 3) ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ą╗ąŠčēą░ą┤ąĖ čĆą░ą▒ąŠč湥ą╣ ąĘąŠąĮčŗ ą▒ąŠą╗ąĄąĄ čĆąĄąĘą║ąŠąĄ, ą┐čĆąĖ ą▒ąŠą╗čīčłąĖčģ ąĘąĮą░č湥ąĮąĖčÅčģ ąōąż (5, 10) - ą▒ąŠą╗ąĄąĄ ą┐ą╗ą░ą▓ąĮąŠąĄ.
ą¤čĆąĖ ąĘą░ą┤ą░ąĮąĮąŠą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖąĖ ą║ č鹊čćąĮąŠčüčéąĖ (1), č鹊 ąĄčüčéčī ą║ ąĘąĮą░č湥ąĮąĖčÄ ąōąż, ąĖą╝ąĄčÄčéčüčÅ čāą│ą╗čŗ Φmą░čģ, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĖąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗąĄ ą┐ą╗ąŠčēą░ą┤ąĖ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą╝ąŠąČąĮąŠ ą┐ąŠčüčéčĆąŠąĖčéčī ą│čĆą░čäąĖą║ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ążčéą░čģ ąŠčé čéčĆąĄą▒čāąĄą╝ąŠą╣ č鹊čćąĮąŠčüčéąĖ.
ąŻą▓ąĄą╗ąĖč湥ąĮąĖąĄ čćąĖčüą╗ą░ ąæąĪ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ą▓ą╗ąĖčÅąĄčé ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ ąōąż, ą░ čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ąĮą░č鹊čćąĮąŠčüčéčī ąĖ čĆą░ą▒ąŠčćčāčÄ ąĘąŠąĮčā. ąĀą░čüčüą╝ąŠčéčĆąĖą╝ čĆą░ą▒ąŠčćčāčÄ ąĘąŠąĮčā ą┤ą╗čÅ čüą╗čāčćą░čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ č湥čéčŗčĆąĄčģ ąæąĪ ą▓ ąĖąĮč鹥čĆąĄčüą░čģ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ąöą╗čÅ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒čŗą╗ąĖ ą▓čŗą▒čĆą░ąĮčŗ č湥čéčŗčĆąĄ ą▓ą░čĆąĖą░ąĮčéą░ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ čéčĆąĄčģ ąŠčüąĮąŠą▓ąĮčŗčģ ąæąĪ ą┐čĆąĖ Φ, čĆą░ą▓ąĮąŠą╝ 60, 90, 120 ąĖ 180 ą│čĆą░ą┤čāčüą░ą╝, ąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čĆą░ąĘą╝ąĄčĆąĄ ą▒ą░ąĘ, ą░ č湥čéą▓ąĄčĆčéą░čÅ ąæąĪ ą┐čĆąĖ čŹč鹊ą╝ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą▓ąŠą║čĆčāą│ ąŠčüąĖ 0ąź ą┐čĆąŠčéąĖą▓ čćą░čüąŠą▓ąŠą╣ čüčéčĆąĄą╗ą║ąĖ ąŠčé 0 ą┤ąŠ 360 ą│čĆą░ą┤čāčüąŠą▓. ąĀąĄąĘčāą╗čīčéą░čéčŗ čĆą░čüč湥č鹊ą▓ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ąĮą░ čĆąĖčü. 4. ąŚą┤ąĄčüčī S - ąĘąĮą░č湥ąĮąĖąĄ ą┐ą╗ąŠčēą░ą┤ąĖ ą┤ą╗čÅ ą┤ą░ąĮąĮąŠą│ąŠ Φ ąĖ Ψ, Smax - ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ą╗ąŠčēą░ą┤ąĄą╣ ąĖąĘ ą▓čüąĄčģ čĆą░čüčüčćąĖčéą░ąĮąĮčŗčģ ą┤ą╗čÅ č湥čéčŗčĆąĄčģ ąĘąĮą░č湥ąĮąĖą╣ Φ ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ Ψ ąŠčé 0 ą┤ąŠ 360 ą│čĆą░ą┤čāčüąŠą▓. ąÜą░ą║ ą▓ąĖą┤ąĮąŠ ąĖąĘ ą│čĆą░čäąĖą║ąŠą▓, ą┐čĆąĖ Φ, čĆą░ą▓ąĮąŠą╝ 180┬░, ąĖą╝ąĄąĄčéčüčÅ ą┤ą▓ą░ ą╝ą░ą║čüąĖą╝čāą╝ą░, ą░ ą┐čĆąĖ Φ, čĆą░ą▓ąĮąŠą╝ 60┬░, ą┐ąŠą╗čāčćą░čÄčéčüčÅ ąĮą░ąĖą▒ąŠą╗čīčłąĖąĄ ąŠčéą╗ąĖčćąĖčÅ ą┐ą╗ąŠčēą░ą┤ąĄą╣ ąĀąŚ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ Φ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ ą┐ąŠą╗čāčćą░ąĄą╝ ą┤ą╗čÅ čāą│ą╗ą░ Ψ, čĆą░ą▓ąĮąŠą│ąŠ 270┬░ ą┤ą╗čÅ ą▓čüąĄčģ ąĘąĮą░č湥ąĮąĖą╣ ąōąż, ąĖ ąĮą░ąĖą▒ąŠą╗čīčłąĄąĄ ąĖąĘ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐čĆąĖ Φ, čĆą░ą▓ąĮąŠą╝ 120┬░ čéą░ą║ąČąĄ ą┤ą╗čÅ ą▓čüąĄčģ ąōąż.
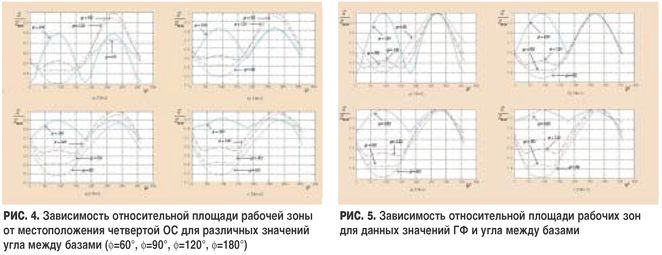
ąØą░ čĆąĖčü. 5 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠą╣ ą┐ą╗ąŠčēą░ą┤ąĖ čĆą░ą▒ąŠč湥ą╣ ąĘąŠąĮčŗ ąŠčé čāą│ą╗ą░ Ψ, ą│ą┤ąĄ Smax - ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ą╗ąŠčēą░ą┤ąĖ ą┤ą╗čÅ ąĖčüčüą╗ąĄą┤čāąĄą╝ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ Φ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ Ψ ąŠčé 0 ą┤ąŠ 360 ą│čĆą░ą┤čāčüąŠą▓. ą¤čĆąĖ ą▒ąŠą╗čīčłąĖčģ ąōąż (5, 10) ąĖ Φ = 180┬░ ą┐ą╗ąŠčēą░ą┤čī ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 20% ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ Ψ ąŠčé 0 ą┤ąŠ 360 ą│čĆą░ą┤čāčüąŠą▓. ą¤čĆąĖ ą╝ą░ą╗čŗčģ ąĘąĮą░č湥ąĮąĖčÅčģ ąōąż (2, 3) ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ą╗ąŠčēą░ą┤ąĖ ą┐čĆąĖ Φ=180┬░ ą╗ąĄąČąĖčé ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 30-80%. ą¤čĆąĖ ą┤čĆčāą│ąĖčģ čāą│ą╗ą░čģ Φ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ą╗ąŠčēą░ą┤ąĖ ąĖą╝ąĄąĄčé ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗą╣ čģą░čĆą░ą║č鹥čĆ. ą×ą┐čéąĖą╝ą░ą╗čīąĮčŗą╝ ą┤ą╗čÅ ą▓čüąĄčģ ąōąż čÅą▓ą╗čÅąĄčéčüčÅ čāą│ąŠą╗ Φ, čĆą░ą▓ąĮčŗą╣ 270┬░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą┐ą╗ąŠčēą░ą┤čī ąĀąŚ ą┐ąŠą╗čāčćą░ąĄą╝ ą┐čĆąĖ Φ=120┬░ ąĖ Φ=270┬░ ą┤ą╗čÅ ą▓čüąĄčģ ąōąż.
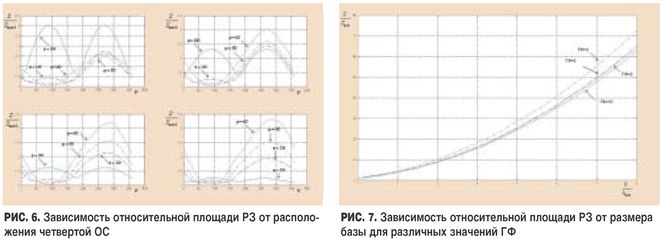
ąØą░ čĆąĖčü. 6 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠą╣ ą┐ą╗ąŠčēą░ą┤ąĖ ąĀąŚ ąŠčé čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ č湥čéą▓ąĄčĆč鹊ą╣ ąæąĪ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą┐ą╗ąŠčēą░ą┤ąĖ ąĀąŚ ą┤ą╗čÅ čéčĆąĄčģ ą×ąĪ čü čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ąōąż. ąŚą┤ąĄčüčī Smax3 čÅą▓ą╗čÅąĄčéčüčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą┐ą╗ąŠčēą░ą┤čīčÄ čĆą░ą▒ąŠč湥ą╣ ąĘąŠąĮčŗ ą┤ą╗čÅ čéčĆąĄčģ čüčéą░ąĮčåąĖą╣. ąśąĘ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗčģ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ čĆą░čüč湥čéą░ ą▓ąĖą┤ąĖą╝, čćč鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ąæąĪ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčé ą┐ą╗ąŠčēą░ą┤čī ąĀąŚ.
ąÆ čģąŠą┤ąĄ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ čéą░ą║ąČąĄ ą▒čŗą╗ ą┐čĆąŠą▓ąĄą┤ąĄąĮ ą░ąĮą░ą╗ąĖąĘ ą▓ą╗ąĖčÅąĮąĖčÅ čĆą░ąĘą╝ąĄčĆą░ ą▒ą░ąĘ ąĮą░ ą┐ą╗ąŠčēą░ą┤čī čĆą░ą▒ąŠč湥ą╣ ąĘąŠąĮčŗ. ąĀąĄąĘčāą╗čīčéą░čéčŗ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖą╣ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ąĮą░ čĆąĖčü. 7, ą│ą┤ąĄ S/Smax - ąŠčéąĮąŠčłąĄąĮąĖąĄ ą┐ą╗ąŠčēą░ą┤ąĖ ą║ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ ą┐ą╗ąŠčēą░ą┤ąĖ, b/bmax - ąŠčéąĮąŠčłąĄąĮąĖąĄ ą┤ą╗ąĖąĮčŗ ą▒ą░ąĘčŗ ą║ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ ą┤ą╗ąĖąĮąĄ ą▒ą░ąĘčŗ. ąśąĘ čĆąĖčüčāąĮą║ą░ ą▓ąĖą┤ąĮąŠ, čćč鹊 ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┐ą╗ąŠčēą░ą┤ąĖ ąŠčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▒ą░ąĘ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą▒ą╗ąĖąĘą║ą░ ą║ ą║ą▓ą░ą┤čĆą░čéąĖčćąĮąŠą╣, ąŠčüąŠą▒ąĄąĮąĮąŠ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ąōąż. ąŁč鹊čé čĆąĄąĘčāą╗čīčéą░čé ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą┐čĆąĖ ąŠčåąĄąĮą║ąĄ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ ą┤ą╗čÅ ą╗čÄą▒čŗčģ ą▒ą░ąĘ, ąĄčüą╗ąĖ ąĖąĘą▓ąĄčüčéąĮą░ čĆą░ą▒ąŠčćą░čÅ ąĘąŠąĮą░ ą┤ą╗čÅ ąŠą┤ąĮąŠą╣ ąĖąĘ ąĮąĖčģ.

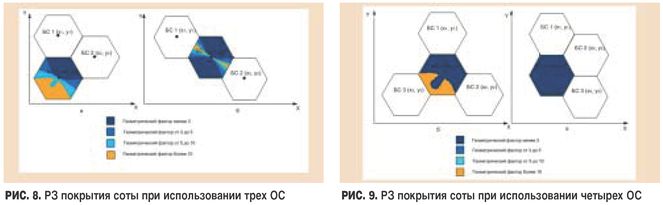
ą¤čĆąĖą▓ąĄą┤ąĄąĮąĮčŗąĄ ą▓čŗčłąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĮąĄ čüą▓čÅąĘą░ąĮčŗ čü čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄą╝ ąæąĪ ą┤ą╗čÅ ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ čüčéčĆčāą║čéčāčĆčŗ ąĪąĪą¤ąĀ. ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčāčÄ čüčéčĆčāą║čéčāčĆčā čüąĄčéąĖ, č鹊 ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą┐ą╗ąŠčēą░ą┤ąĖ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ ą▒čāą┤ąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ąŠčé čćąĖčüą╗ą░ ąæąĪ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą┐ąŠą╗ąŠą│ąĖąĖ ąĖčģ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ. ąæčŗą╗ąĖ čĆą░čüčüą╝ąŠčéčĆąĄąĮčŗ ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ č鹊ą┐ąŠą╗ąŠą│ąĖąĖ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čüčéčĆčāą║čéčāčĆ ąĪąĪą¤ąĀ, ą▓čŗčÅą▓ą╗ąĄąĮčŗ ąĮą░ąĖą╗čāčćčłąĖąĄ ąĖ ąĮą░ąĖčģčāą┤čłąĖąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ą┐ąŠ ą║čĆąĖč鹥čĆąĖčÄ ą╝ą░ą║čüąĖą╝čāą╝ą░ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ. ąĀąĄąĘčāą╗čīčéą░čéčŗ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĖ ąĮą░ čĆąĖčü. 8-9, ą┐čĆąĖ čŹč鹊ą╝ ąĮą░ čĆąĖčüčāąĮą║ą░čģ ąĖąĮą┤ąĄą║čüąŠą╝ "ą░" ąŠą▒ąŠąĘąĮą░č湥ąĮčŗ ąĮą░ąĖą╗čāčćčłąĖąĄ ą▓ą░čĆąĖą░ąĮčéčŗ, ąĖąĮą┤ąĄą║čüąŠą╝ "ą▒" - ąĮą░ąĖčģčāą┤čłąĖąĄ.
ąÆ čéą░ą▒ą╗ąĖčåąĄ čāą║ą░ąĘą░ąĮ ą┐čĆąŠčåąĄąĮčé ą┐ąŠą║čĆčŗčéąĖčÅ čüąŠčéčŗ ą▓ąĄą┤čāčēąĄą╣ čüčéą░ąĮčåąĖąĖ čĆą░ą▒ąŠč湥ą╣ ąĘąŠąĮąŠą╣ ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ąōąż. ąŚą┤ąĄčüčī ąČąĄ ą▓ąĖą┤ąĮąŠ, čćč鹊 ą┐čĆąĖ čćąĖčüą╗ąĄ čüčéą░ąĮčåąĖą╣ ą▓ čüąĖčüč鹥ą╝ąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąĄ ą▒ąŠą╗ąĄąĄ čéčĆąĄčģ ą┤ą╗čÅ ąĮą░ąĖą╗čāčćčłąĄą│ąŠ ą▓ą░čĆąĖą░ąĮčéą░ ą╝čŗ ąĖą╝ąĄąĄą╝ 71% ą┐ąŠą║čĆčŗčéąĖčÅ čüąŠčéčŗ, ą┐čĆąĖ čŹč鹊ą╝ ąōąż ąĮąĄ ą┐čĆąĄą▓čŗčłą░ąĄčé 3. ąöą╗čÅ ąĮą░ąĖčģčāą┤čłąĄą│ąŠ ą▓ą░čĆąĖą░ąĮčéą░ ą▓ čåąĄą╗čÅčģ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čāčćą░ąĄą╝ 48% ą┐ąŠą║čĆčŗčéąĖčÅ čüąŠčéčŗ ą▓ąĄą┤čāčēąĄą╣ čüčéą░ąĮčåąĖąĖ. ąöą╗čÅ č湥čéčŗčĆąĄčģ čüčéą░ąĮčåąĖą╣ ą┐čĆąĖ ąĮą░ąĖą╗čāčćčłąĄą╝ ą▓ą░čĆąĖą░ąĮč鹥 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ 100%-ąĮąŠąĄ ą┐ąŠą║čĆčŗčéąĖąĄ čüąŠčéčŗ, ą┤ą╗čÅ ąĮą░ąĖčģčāą┤čłąĄą│ąŠ - č鹊ą╗čīą║ąŠ 74%, ąĮąŠ ą┤ą░ąČąĄ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖ ąōąż ąĮąĄ ą▒ąŠą╗ąĄąĄ 5 ą┐ąŠą║čĆčŗą▓ą░ąĄčéčüčÅ 100% č鹥čĆčĆąĖč鹊čĆąĖąĖ. ą¤čĆąĖ čćąĖčüą╗ąĄ čüčéą░ąĮčåąĖą╣ ą▒ąŠą╗ąĄąĄ 5 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ 100%-ąĮąŠąĄ ą┐ąŠą║čĆčŗčéąĖąĄ č鹥čĆčĆąĖč鹊čĆąĖąĖ ą┤ą░ąČąĄ ą┐čĆąĖ ąōąż ąĮąĄ ą▒ąŠą╗ąĄąĄ 3. ąŁč鹊 ą▓ą░ąČąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą┤ą╗čÅ ą┐čĆą░ą║čéąĖą║ąĖ, ąĖąĘ ą║ąŠč鹊čĆąŠą│ąŠ čüą╗ąĄą┤čāąĄčé, čćč鹊 ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║č鹊ą▓ čāą▓ąĄą╗ąĖč湥ąĮąĖąĄ čćąĖčüą╗ą░ čüčéą░ąĮčåąĖą╣, čÅą▓ą╗čÅčÄčēąĖčģčüčÅ ąŠą┐ąŠčĆąĮčŗą╝ąĖ, ą▒ąŠą╗čīčłąĄ č湥čéčŗčĆąĄčģ ąĮąĄ ąĖą│čĆą░ąĄčé čüčāčēąĄčüčéą▓ąĄąĮąĮąŠą╣ čĆąŠą╗ąĖ ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĖčÅ ą┐ą╗ąŠčēą░ą┤ąĖ čĆą░ą▒ąŠčćąĖčģ ąĘąŠąĮ ąĖ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ.
ąśčéą░ą║, ą┐ąŠą┤č湥čĆą║ąĮąĄą╝, čćč鹊 čĆą░ąĘą╝ąĄčĆ č鹥čĆčĆąĖč鹊čĆąĖąĖ ą┐ąŠą║čĆčŗčéąĖčÅ čāčüą╗čāą│ąŠą╣ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĮąĄ č鹊ą╗čīą║ąŠ ą│ąĄąŠą╝ąĄčéčĆąĖąĄą╣, ąĮąŠ ąĖ 菹ĮąĄčĆą│ąĄčéąĖą║ąŠą╣. ą×ą▒ą░ čäą░ą║č鹊čĆą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāčćąĖčéčŗą▓ą░čéčī ąŠą┐ąĄčĆą░č鹊čĆą░ą╝ ąĖ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅą╝, ąŠčåąĄąĮąĖą▓ą░čÅ č鹥čĆčĆąĖč鹊čĆąĖčÄ ą┐ąŠą║čĆčŗčéąĖčÅ. ąŻč湥čé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĮąĖčģ ąĮąĄ ą▒čāą┤ąĄčé ąŠčéčĆą░ąČą░čéčī čĆąĄą░ą╗čīąĮčāčÄ čüąĖčéčāą░čåąĖčÄ ą┐ąŠ čāčüą╗čāą│ąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ąöą╗čÅ ąŠčåąĄąĮąŠą║ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąĘčāą╗čīčéą░čéčŗ ąĖ ą╝ąĄč鹊ą┤ąĖą║čā, ą┐čĆąĄą┤ą╗ąŠąČąĄąĮąĮčāčÄ ą▓ ą┤ą░ąĮąĮąŠą╣ čĆą░ą▒ąŠč鹥 ąĖ ą▓ čĆą░ąĮąĄąĄ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąĮąŠą╣ čüčéą░čéčīąĄ ą┐ąŠ ą┤ą░ąĮąĮąŠą╣ ą┐čĆąŠą▒ą╗ąĄą╝ąĄ.
ą×ą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąŠ: ą¢čāčĆąĮą░ą╗ "ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ąĖ čüčĆąĄą┤čüčéą▓ą░ čüą▓čÅąĘąĖ" #3, 2009
ą¤ąŠčüąĄčēąĄąĮąĖą╣: 6840
ąĪčéą░čéčīąĖ ą┐ąŠ č鹥ą╝ąĄ
ąÉą▓č鹊čĆ
| |||
ąÉą▓č鹊čĆ
| |||
ąÆ čĆčāą▒čĆąĖą║čā "ąĀąĄčłąĄąĮąĖčÅ ą║ąŠčĆą┐ąŠčĆą░čéąĖą▓ąĮąŠą│ąŠ ą║ą╗ą░čüčüą░" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣



