
В рубрику "Решения корпоративного класса" | К списку рубрик | К списку авторов | К списку публикаций
Необходимость внедрения на территориально распределенном производстве, в промышленной зоне или на транспортном узле системы, способной определять местоположение мобильных объектов (Real Time Location System – RTLS), ставит перед ответственными лицами задачу выбора технологии, с помощью которой это необходимо осуществить. Очевидно, что рассматривать системы, использующие сигналы навигационных спутников для мониторинга мобильных объектов в ангарах, тоннелях, шахтах и цехах бессмысленно. Для работы в закрытых пространствах необходимы технологии локального позиционирования, использующие системы с собственной инфраструктурой, относительно элементов которой происходит определение местоположения мобильных объектов. Анализу таких RTLS-технологий, локальных систем, сравнению их достоинств и недостатков посвящен данный материал.
The necessity to implement system, capable of determining the location of mobile objects (Real Time Location System -RTLS) on the multisite operations, in the industrial zone or transport hub, poses to decision-makers the problem of choosing technology by means of which it is necessary to carry out. Obviously, considering systems, which use satellite navigation signals for monitoring of mobile objects in the hangars, tunnels, mines and workshops, is pointless. For work in confined spaces it is necessary to have local positioning technology using a system with its own infrastructure, which takes place on the elements of the definition of the mobile objects location. This article is devoted to the analysis of such RTLS technologies, local systems, comparison of their merits and demerits.

Для определения местоположения мобильных объектов в локальных и зональных системах и их (объектов) мониторинга, в настоящее время чаще всего используются:
Практически все существующие технологии предусматривают наличие и использование устройств, определяемых законодательством как радиоэлектронные средства (РЭС). Ввоз, разработка и использование РЭС на территории Российской Федерации определяются рядом законов и нормативных актов, к которым относятся:
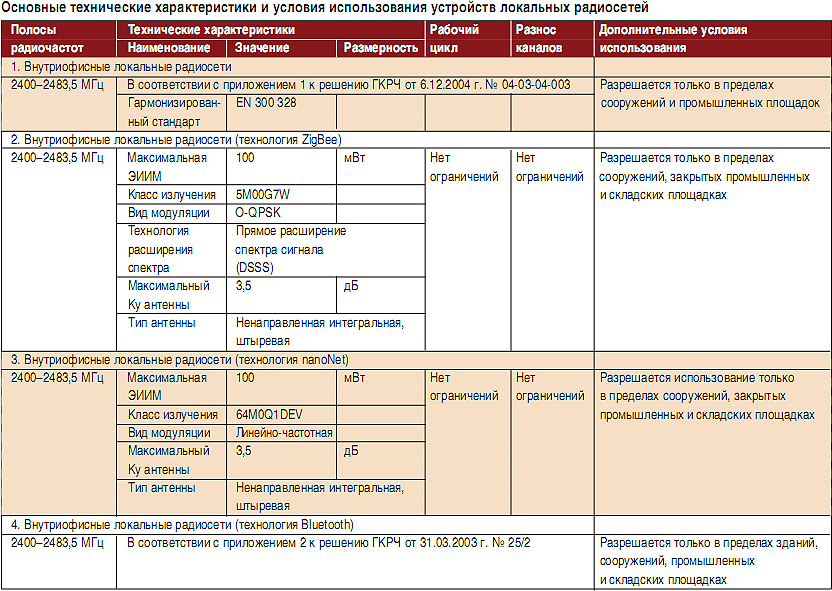
Большинство технологий локальных и зональных RTLS требует использования РЭС, относящихся к устройствам для радиосетей малого радиуса действия. Перечень стандартов, технологий, параметров и характеристик (см. таблицу), которым должно соответствовать такое оборудование, определен решением Государственной комиссии по радиочастотам от 07.05.2007 № 07-20-03-001 "О выделении полос радиочастот устройствам малого радиуса действия".
Многие технологии локального позиционирования, как отмечено в [1], позволяют создавать RTLS, способные решать задачи как локального, так и зонального (при соответствующем масштабировании) уровня.
Инфраструктура таких систем, как правило, способна не только в реальном масштабе времени определять местоположение мобильных объектов (персонала, техники), но и обеспечить обмен координатной и служебной информацией между средствами системы и мобильными объектами, являющимися ее абонентами.
Технологии позиционирования в сетях DECT
Технология позиционирования и мониторинга подвижных объектов в сетях DECT основана на периодическом (раз в 5–10 с) измерении каждым абонентским устройством уровня радиосигнала (метод RSS – Received Signal Strength) от всех базовых станций (БС) своей сети, которые устройство способно обнаружить. Измеренные значения передаются по радиоканалу DECT на контроллер БС и далее на сервер базы данных (СБД). Программное обеспечение сервера, обеспечивающее позиционирование, анализирует поступившие на СБД значения и определяет расстояние от абонента до каждой из БС. Если местоположение всех БС в DECT-системе известно и нанесено на план, то положение абонента может быть определено решением геометрической задачи или задачи кластеризации и распознавания. Результаты выводятся на компьютер рабочего места оператора и сохраняются в базе данных.
Каждая БС должна быть связана с контроллером БС проводной линией, поэтому возможности масштабирования системы ограничены возможностями по прокладке линий связи от контроллера до базовых станций.
Обеспечивая подвижную радиосвязь, технология позволяет определять местоположение абонентов с точностью до конкретной БС без использования специализированного программного обеспечения (ПО), а также с точностью 5…10 м на открытом пространстве или в пределах помещения, находящегося в зоне обслуживания системы со специализированным ПО. Точность значительно снижается при работе в сооружениях, материалы конструкций которых имеют разнородную структуру.
Сравнительно низкая точность обусловлена:
Технологии позиционирования в сетях Wi-Fi (IEEE 802.11a/g/n)
Технологии локального позиционирования в сетях стандарта IEEE 802.11a/g/n (Wi-Fi) широко распространены и подробно описаны в популярной и технической литературе.
Wi-Fi-технологии имеют некоторые особенности, определяющие возможности и характеристики RTLS, созданных на их основе. Эти особенности обусловлены:
Абонентами, обслуживаемыми системами на основе Wi-Fi, могут быть: смартфоны, ноутбуки, Wi-Fi-телефоны, считыватели штрихкодов, Wi-Fi RFID-теги и другие устройства.
Стандарт IEEE 802.11a/g/n предусматривает CSMA/CA как протокол доступа устройств к среде передачи данных. Однако некоторые производители оборудования для Wi-Fi-устройств централизованных систем, в том числе RTLS, – например, AeroScout, Aruba, Cisco, H P, Motorola – используют модернизированные протоколы доступа к среде или протоколы передачи данных. Это приводит к невозможности одновременного использования в одной сети/системе:
Ключевой особенностью, определяющей возможности Wi-Fi RTLS, являются применяемые методы позиционирования [1]. В системах первых поколений, имеющих возможности определять местоположение абонентов с точностью до 10 м, чаще всего применялись методы RSS (Received Signal Strength) и TDoA (Time Difference of Arrival) или их сочетание. При RSS расстояние до объекта оценивается по мощности (уровню) сигнала. Как и в случае с DECT, при работе в сооружениях из материалов с неоднородной структурой и при увеличении дальности метод RSS дает большую ошибку за счет специфики распространения радиосигнала. Применение метода TDoA в силу специфики организации синхронизации также не обеспечивало необходимой точности.
Современные системы позиционирования и мониторинга на основе IEEE 802.11a/g/n (Cisco, Ekahau) для определения местоположения абонентов наряду с RSS и TDoA используют метод LPT (Location Patterning Techniques). Он основан на предварительном получении, выборке и записи на сервер управления моделей поведения радиосигнала в конкретных условиях. LPT обеспечивает приемлемую (1–5 м) точность определения местоположения абонента, но при этом имеет ряд особенностей. При развертывании и вводе в эксплуатацию системы необходимо выполнить длительные, тщательные работы по ее юстировке. Иначе говоря, перед началом эксплуатации системы квалифицированные специалисты должны произвести "снятие" и документирование портрета (или портретов) помещений и территории зоны (сегментов зоны) обслуживания в радиочастотном спектре.
Архитектура Wi-Fi RTLS является достаточно сложной, построение и эксплуатация таких сетей требуют наличия квалифицированных специалистов.
Стоимость систем, использующих Wi-Fi, существенно повышает тот фактор, что в рекомендациях и учебных курсах известных производителей Wi-Fi-оборудования при подготовке решений задач позиционирования, указывается необходимость вдвое увеличить количество (плотность) точек доступа в инфраструктуре по сравнению с инфраструктурой, не имеющей таких задач. Соответственно строительство новой или модернизация под задачи позиционирования уже имеющейся на предприятии беспроводной сети стандарта IEEE 802.11a/g/n требуют более развитой структурированной кабельной сети (СКС) и более тщательного подхода к радиочастотному планированию. Кроме того, некоторые производители, например Cisco, на своих сайтах рекомендуют выполнять работы по "снятию" и документированию радиочастотных портретов помещений и зон обслуживания сети IEEE 802.11a/g/n один раз в полгода [11].
Соблюдение всех требований и рекомендаций производителей оборудования Wi-Fi RTLS приводят к значительному возрастанию стоимости решений, поэтому при планировании бюджета создаваемой системы позиционирования необходимо внимательно относиться к перечисленным выше факторам. Также следует учитывать, что не все оборудование стандарта IEEE 802.11a/g/n, ввозимое в страну, определено как устройства для сетей малого радиуса действия, что накладывает ограничения на его использование.
Технологии позиционирования по сигналам автономных "закладок-маяков"
Рассматривая возможность внедрения системы позиционирования и мониторинга с использованием автономных "закладок-маяков", следует учитывать следующее:
Технология Ultra Wideband
В технологии Ultra Wideband (UWB) для передачи полезной информации применяются короткие импульсы с максимально возможной шириной спектра. Используются псевдослучайное кодирование фазы, позиции и/или частоты повторения импульсов и когерентная обработка или некогерентная обработка при приеме сигнала. UWB обеспечивает позиционирование мобильных объектов системы с высокой точностью – до нескольких десятков сантиметров. Существуют USB UWB-устройства (рис. 2).

Недостатки технологии:
Технология Bluetooth
Принятие стандарта IEEE 802.15.1 Bluetooth обеспечило развитие технологий, способных производить обмен информацией в радиусе до 100 м друг от друга между устройствами самого различного назначения и классов. Компактность и низкая стоимость модулей Bluetooth стали основанием для многочисленных разработок локальных систем позиционирования на их основе.
Для обмена данными устройства IEEE 802.15.1 используют технологию расширения спектра со скачкообразной перестройкой частоты – Frequency Hopping Spread Spectrum (FHSS). Переключение между частотами происходит синхронно, его последовательность для каждого соединения псевдослучайна и известна только передатчику и приемнику, участвующим в соединении. Пары приемник-передатчик соседних соединений не мешают друг другу. Протокол Bluetooth поддерживает соединения "точка-точка" и "точка-многоточка".
Невозможность работы устройств Bluetooth в сетях с древовидной, линейной (многозвенной) и MESH-топологией (самоорганизующейся ячеистой), а также невозможность достижения приемлемой точности определения местоположения объектов средствами Bluetooth предопределило отказ от его применения для решения задач позиционирования.
Технология ZigВee
ZigВee – это название технологии, включающей протоколы верхних уровней, специальное программное обеспечение, конфиденциальную техническую информацию для беспроводных устройств и опирающейся на стандарт IEEE 802.15.4. ZigВee разработана для работы с приложениями, требующими безопасных каналов связи и обеспечения длительного функционирования устройств сети от автономных источников питания. В диапазоне 2400 МГц передача данных между устройствами ZigBee происходит с использованием расширения спектра методом DSSS – Direct Sequence Spread Spectrum.
В отличие от Bluetooth, устройства ZigBee (рис. 3) обеспечивают создание беспроводных сетей с самой различной архитектурой, в том числе и топологией MESH (самоорганизующаяся ячеистая сеть с ретрансляцией и маршрутизацией сообщений). Это предопределило перспективы применения технологии ZigВee в технологических сетях и RTLS.

В целом к основному недостатку ZigВee большинство экспертов относят "закрытость" этого протокола (в отличие от самого IEEE 802.15.4) для разработчиков сторонних приложений. Протоколы ZigВee доступны только членам альянса ZigВee.
Сложилась ситуация, когда для систем определения местоположения мобильных объектов и их мониторинга в закрытых пространствах с высокой точностью потребовалась технология, реализующая:
Технология nanoLoc
В 2007 г. компания Nanotron Technologies GmbH (Германия) создала технологию nanoLOC, а затем стандартизировала ее как IEEE 802.15.4а. Разработчики NanoLOC сохранили все достоинства ZigВee и сумели обойти имевшиеся у ZigВee недостатки.
Технология nanoLOC реализует возможность измерения расстояний между устройствами сети. Она позволяет строить радиосети любой архитектуры, обеспечивает высокую точность позиционирования, имеет открытый протокол взаимодействия. Максимальная битовая скорость 1 Мбит/с, при необходимости улучшения характеристик канала она может быть снижена до 250 кбит/с. В технологии nanoLOC заложена возможность организации канала обмена голосовыми сообщениями одновременно с измерением расстояний и передачей данных о местоположении абонента. Как и в ZigВee, частотный диапазон работы nanoLOC 2400– 2483,5 МГц при ширине спектра 80 МГц. РЭС (рис. 4) также относится к устройствам малого радиуса действия, его применение не требует получения частотных разрешений и дополнительных согласований.
Для адресации узлов сети nanoLOC используются 6-байтовые числа, для передачи данных применяются сигналы с плавно изменяющейся частотой – CSS. Автокорреляционные свойства сигнала делают технологию устойчивой к внешним помехам.
И для выполнения функций узлов беспроводной сети, и для измерения расстояний до тегов точки доступа инфраструктуры IEEE 802.15.4а используют один радиоинтерфейс – nanoLOC.
Измерение расстояний в технологии nanoLOC производится с использованием метода SDS-TWR (Symmetric Double Sided Two Way Ranging), входящего в группу методов ToF. При методе SDS-TWR измерение расстояний производится обеими сторонами, а затем берется среднее значение. Это минимизирует рассинхронизацию приемопередатчиков устройств в случае "ухода" центральной частоты.
Устойчивость технологии к помехам, обусловленная особенностями алгоритмов обработки сигналов, обеспечила возможность определения местоположения объектов за пределами периметра зоны обслуживания с незначительным снижением точности.
Очень важным свойством технологии и протоколов nanoLOC является открытость универсального протокола взаимодействия с внешними системами.
Открытость протоколов, позволяет считать технологию nanoLOC одной из самых перспективных для разработки и внедрения систем локального позиционирования реального времени.
При выборе системы RTLS не стоит руководствоваться утверждениями того или иного производителя. В зависимости от области применения системы, задач, условий работы и перспектив модернизации нужно детально определить все требования к системе, а затем тщательно проанализировать возможности технологий по их соответствию существующим и перспективным задачам.
Особенно следует обратить внимание на следующие факторы:
И уже только потом производить обоснованный выбор.
Учитывая ограничения по объему материала, автор ставил перед собой задачу выделить наиболее значащие свойства, возможности, достоинства и недостатки технологий, нашедших наиболее широкое применение в системах локального и зонального позиционирования.
Литература
Опубликовано: Журнал "Технологии и средства связи" #3, 2014
Посещений: 11930
Статьи по теме
Автор
| |||
В рубрику "Решения корпоративного класса" | К списку рубрик | К списку авторов | К списку публикаций
