
ąÆ čĆčāą▒čĆąĖą║čā "ąĪą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüą▓čÅąĘčī" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣
ąōąĄąĮąĮą░ą┤ąĖą╣ ąÆąĄčĆąĘčāąĮąŠą▓
ąĀčāą║ąŠą▓ąŠą┤ąĖč鹥ą╗čī čåąĄąĮčéčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖą╣ ąĖ ą╝ą░čĆą║ąĄčéąĖąĮą│ą░
ążąōąŻą¤ "ąØą¤ą” "ąÆąĖą│čüčéą░čĆ"

ą¤ąĄčéčĆ ąÜąŠčĆą▓čÅą║ąŠą▓
ą¤ąĄčĆą▓čŗą╣ ąĘą░ą╝ąĄčüčéąĖč鹥ą╗čī ą│ąĄąĮąĄčĆą░ą╗čīąĮąŠą│ąŠ ą┤ąĖčĆąĄą║č鹊čĆą░ ą×ąÉą×
"ąōą░ąĘą║ąŠą╝"

ąÆąĖą║č鹊čĆ ą£ąŠą│čāč湥ą▓
ąĀčāą║ąŠą▓ąŠą┤ąĖč鹥ą╗čī čåąĄąĮčéčĆą░ ąŠą▒čēąĄčüąĖčüč鹥ą╝ąĮčŗčģ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖą╣ ążąōąŻą¤
"ąØą¤ą” "ąÆąĖą│čüčéą░čĆ", ą║.čé.ąĮ., čü.ąĮ.čü.

ą×ą┐ąĄčĆą░č鹊čĆčŗ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čüą▓čÅąĘąĖ ąĮąĄčüčāčé čĆąĄą░ą╗čīąĮčŗąĄ čāą▒čŗčéą║ąĖ ąŠčé ąĮąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖčģ čćą░čüč鹊čéąĮąŠ-菹ĮąĄčĆą│ąĄčéąĖč湥čüą║ąŠą│ąŠ čĆąĄčüčāčĆčüą░. ąÉčĆčüąĄąĮą░ą╗ čüą┐ąŠčüąŠą▒ąŠą▓ ą▒ąŠčĆčīą▒čŗ čü čŹčéąĖą╝ čÅą▓ą╗ąĄąĮąĖąĄą╝ ą║čĆą░ą╣ąĮąĄ ąŠą│čĆą░ąĮąĖč湥ąĮ ąĖ ą▓ čåąĄą╗ąŠą╝ ą╝ą░ą╗ąŠčŹčäč乥ą║čéąĖą▓ąĄąĮ. ąÉ ą╝ąĄąČą┤čā č鹥ą╝ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ "ą┐ąĖčĆą░č鹊ą▓" ąĖą╗ąĖ ą┐čĆąŠčüč鹊 ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą╝ąĄčłą░čÄčēąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ č鹊čćąĮąŠ ąĖ ą┤ą░ą╗ąĄąĄ ą▓ąĄčüčéąĖ ą▒ąŠčĆčīą▒čā čü ąĮąĖą╝ąĖ ą▓ą┐ąŠą╗ąĮąĄ ą┐čĆą░ą▓ąŠą▓čŗą╝ąĖ ą╝ąĄč鹊ą┤ą░ą╝ąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ čāąČąĄ čüčāčēąĄčüčéą▓čāčÄčé č鹥čģąĮąŠą╗ąŠą│ąĖąĖ, ąĖ ąĮąĄ č鹊ą╗čīą║ąŠ ąĘą░čĆčāą▒ąĄąČąĮčŗąĄ, ąĮąŠ ąĖ čĆąŠčüčüąĖą╣čüą║ąĖąĄ.
ąÆčüąĄ ąŠą┐ąĄčĆą░č鹊čĆčŗ čüąĄč鹥ą╣ čüą▓čÅąĘąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖąĄ čüą┐čāčéąĮąĖą║ąĖ-čĆąĄčéčĆą░ąĮčüą╗čÅč鹊čĆčŗ ąĮą░ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮąŠą╣ ąŠčĆą▒ąĖč鹥, čüčéą░ą╗ą║ąĖą▓ą░čÄčéčüčÅ čü ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖąĄą╝ čĆą░ą┤ąĖąŠą┐ąŠą╝ąĄčģ ąĖą╗ąĖ ąĮąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čćą░čüč鹊čéąĮąŠ-菹ĮąĄčĆą│ąĄčéąĖč湥čüą║ąŠą│ąŠ čĆąĄčüčāčĆčüą░. ą×čé č鹊ą│ąŠ, ąĮą░čüą║ąŠą╗čīą║ąŠ ą▒čŗčüčéčĆąŠ ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠ ąŠą┐ąĄčĆą░č鹊čĆčŗ čüą┐ąŠčüąŠą▒ąĮčŗ ą▒ąŠčĆąŠčéčīčüčÅ čü čŹčéąĖą╝ąĖ čÅą▓ą╗ąĄąĮąĖčÅą╝ąĖ, ąĘą░ą▓ąĖčüčÅčé čĆą░ąĘą╝ąĄčĆčŗ ąĖčģ ą┐ąŠč鹥čĆčī ąĖ, ą│ą╗ą░ą▓ąĮąŠąĄ, ą┐ąŠč鹥čĆčī ą║ąŠąĮąĄčćąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣, čéą░ą║ąČąĄ čüčéčĆą░ą┤ą░čÄčēąĖčģ ąŠčé ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ čĆą░ą┤ąĖąŠą┐ąŠą╝ąĄčģ ąĖ ąĮąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░. ą×čüčéčĆąŠčéą░ čŹč鹊ą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą▓ąŠąĘčĆą░čüčéą░ąĄčé ą▓ ą│ąĄąŠą╝ąĄčéčĆąĖč湥čüą║ąŠą╣ ą┐čĆąŠą│čĆąĄčüčüąĖąĖ čü čĆąŠčüč鹊ą╝ ąĘą░ą│čĆčāąĘą║ąĖ čéčĆą░ąĮčüą┐ąŠąĮą┤ąĄčĆąŠą▓, ą┐ąŠčüą║ąŠą╗čīą║čā čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą╝ą░ąĮąĄą▓čĆą░ ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čĆąĄąĘąĄčĆą▓ąĮčŗčģ čćą░čüč鹊čé, ą░ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą╗čÄą▒ąŠą│ąŠ ą▓ąĮąĄčüąĖčüč鹥ą╝ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐ąŠčĆą░ąČąĄąĮąĖčÄ ą┤ąĄą╣čüčéą▓čāčÄčēąĖčģ ą║ą░ąĮą░ą╗ąŠą▓. ąÆąŠ ą▓čüčÅą║ąŠą╝ čüą╗čāčćą░ąĄ, čĆąŠčüčé ą┐ąŠą┤ąŠą▒ąĮčŗčģ ą┐ąŠč鹥čĆčī ą┤ąĖą║čéčāąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ąĖąĮą▓ąĄčüčéąĖčåąĖą╣ ą▓ ąĘą░čēąĖčéąĮčŗąĄ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ. ąØą░ąĖą▒ąŠą╗ąĄąĄ čłąĖčĆąŠą║ąŠ ąŠą┐ąĄčĆą░č鹊čĆčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüąĄą│ąŠą┤ąĮčÅ ą╝ąĄč鹊ą┤ čĆą░ą┤ąĖąŠą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčĆą░čéčüą║ąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą▒ąŠą╗ąĄąĄ ą╝ąŠčēąĮčŗą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ čüą▓ąŠąĄą╣ ąĘąĄą╝ąĮąŠą╣ čüčéą░ąĮčåąĖąĖ. ą×ą┤ąĮą░ą║ąŠ čŹč鹊čé ą╝ąĄč鹊ą┤:
ŌĆó ąĮąĄ ą▓čüąĄą│ą┤ą░ ą┐čĆąĖą╝ąĄąĮąĖą╝, čéą░ą║ ą║ą░ą║ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą▒ąŠą╗čīčłąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ čüą┐ąŠčüąŠą▒ąĄąĮ ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą┐čĆąĖąĄą╝ą╗ąĄą╝ąŠą╝čā ą▓ąŠąĘčĆą░čüčéą░ąĮąĖčÄ ąĖąĮč鹥čĆą╝ąŠą┤čāą╗čÅčåąĖąŠąĮąĮčŗčģ ą┐ąŠą╝ąĄčģ ą▓čüąĄą╝ ą┐ąŠą╗ąĄąĘąĮčŗą╝ čüąĖą│ąĮą░ą╗ą░ą╝ ą▓ čéčĆą░ąĮčüą┐ąŠąĮą┤ąĄčĆąĄ;
ŌĆó ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé ąŠčé ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ "ą┐ąĖčĆą░č鹊ą▓" ąĮą░ ą┤čĆčāą│ąĖčģ čāčćą░čüčéą║ą░čģ čćą░čüč鹊čéąĮąŠą│ąŠ čüą┐ąĄą║čéčĆą░, čćč鹊, čüąŠą▒čüčéą▓ąĄąĮąĮąŠ, ąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ;
ŌĆó ą░ą▒čüąŠą╗čÄčéąĮąŠ ąĮąĄčŹčäč乥ą║čéąĖą▓ąĄąĮ ą▓ čüą╗čāčćą░ąĄ ą┐ą░čĆą░ąĘąĖčéąĮčŗčģ ąĖą╗ąĖ ąŠčłąĖą▒ąŠčćąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓, čäą░ą║čé ąĖąĘą╗čāč湥ąĮąĖčÅ ą║ąŠč鹊čĆčŗčģ ąĘą░čćą░čüčéčāčÄ ąĮąĄąĖąĘą▓ąĄčüč鹥ąĮ ą┤ą░ąČąĄ ą▓ą╗ą░ą┤ąĄą╗čīčåą░ą╝ ąĖąĘą╗čāčćą░čÄčēąĖčģ ąĖčģ čüčĆąĄą┤čüčéą▓.
ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ čĆąŠčüčüąĖą╣čüą║ąĖčģ ą┐čĆą░ą▓ąŠą▓čŗčģ ąŠčéąĮąŠčłąĄąĮąĖą╣ ąĖ ą┤ąĄą╣čüčéą▓čāčÄčēąĖčģ ąĘą░ą║ąŠąĮąŠą┤ą░č鹥ą╗čīąĮčŗčģ ą░ą║č鹊ą▓ ą▓ ąŠą▒ą╗ą░čüčéąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮąŠą│ąŠ čüą┐ąĄą║čéčĆą░ ą╗ąĄą│ąĖčéąĖą╝ąĮąŠą╣ čÅą▓ą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēą░čÅ čåąĄą┐ąŠčćą║ą░ ą┤ąĄą╣čüčéą▓ąĖą╣ ą┐čĆąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĖ ąŠą┐ąĄčĆą░č鹊čĆąŠą╝ čäą░ą║čéą░ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą▓ąĮąĄčüąĖčüč鹥ą╝ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓:
ŌĆó ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĘą░čÅą▓ą║ąĖ ąŠ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖąĖ ą┐ąŠą╝ąĄčģąĖ;
ŌĆó ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▓ąĮąĄčüąĖčüč鹥ą╝ąĮąŠą│ąŠ, "ą┐ąĖčĆą░čéčüą║ąŠą│ąŠ" ąŠą▒čŖąĄą║čéą░ (čüąĄčĆčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ čüčĆąĄą┤čüčéą▓ą░ą╝ąĖ ą╗ąĖą▒ąŠ čüą░ą╝ąŠą│ąŠ ąŠą┐ąĄčĆą░č鹊čĆą░, ą╗ąĖą▒ąŠ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮčŗčģ ąŠčĆą│ą░ąĮąŠą▓);
ŌĆó ą▒ąŠčĆčīą▒ą░ čü ąĮąĖą╝ ą░ą┤ą╝ąĖąĮąĖčüčéčĆą░čéąĖą▓ąĮčŗą╝ąĖ, čÄčĆąĖą┤ąĖč湥čüą║ąĖą╝ąĖ ą╝ąĄč鹊ą┤ą░ą╝ąĖ, ą▓ą┐ą╗ąŠčéčī ą┤ąŠ čüčāą┤ąĄą▒ąĮčŗčģ, čüąŠ čüč鹊čĆąŠąĮčŗ ą│ąŠčüčāą┤ą░čĆčüčéą▓ąĄąĮąĮčŗčģ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮčŗčģ ąŠčĆą│ą░ąĮąŠą▓.
ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą┐čĆąĖ ąŠč湥ą▓ąĖą┤ąĮąŠą╣ ąĘą░ąĖąĮč鹥čĆąĄčüąŠą▓ą░ąĮąĮąŠčüčéąĖ ąŠą┐ąĄčĆą░č鹊čĆąŠą▓ ą▓ čĆąĄčłąĄąĮąĖąĖ ą┤ą░ąĮąĮąŠą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą║ąŠąĮąĄčćąĮą░čÅ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠčüčéčī ąĘą░ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ 菹║čüą┐ą╗čāą░čéą░čåąĖąŠąĮąĮąŠą╣ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ čćą░čüč鹊čéąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą│ąŠ čĆąĄčüčāčĆčüą░ ą╗ąĄąČąĖčé ąĮą░ ą│ąŠčüčāą┤ą░čĆčüčéą▓ąĄąĮąĮčŗčģ ąŠčĆą│ą░ąĮą░čģ.
ąöą╗čÅ ą▓ą░čĆąĖą░ąĮč鹊ą▓, ą║ąŠą│ą┤ą░ ąĖčüč鹊čćąĮąĖą║ ą▓ąĮąĄčüąĖčüč鹥ą╝ąĮąŠą│ąŠ ąĖąĘą╗čāč湥ąĮąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąĮąĄ č鹥čĆčĆąĖč鹊čĆąĖąĖ ąĀąŠčüčüąĖąĖ, ą┐čĆąŠą▒ą╗ąĄą╝ą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĄčēąĄ ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮąŠą╣: ą┤ąŠ ąĮą░čüč鹊čÅčēąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą£ąĄąČą┤čāąĮą░čĆąŠą┤ąĮčŗą╝ čüąŠčĹʹŠą╝ 菹╗ąĄą║čéčĆąŠčüą▓čÅąĘąĖ ąĮąĄ ą┐čĆąĖąĮčÅčéčŗ ąĮąŠčĆą╝ą░čéąĖą▓ąĮąŠ-ą┐čĆą░ą▓ąŠą▓čŗąĄ ą┤ąŠą║čāą╝ąĄąĮčéčŗ, čĆąĄą│ą╗ą░ą╝ąĄąĮčéąĖčĆčāčÄčēąĖąĄ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠą┤ąŠą▒ąĮčŗčģ ą┐ąŠą╝ąĄčģ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüąĖčüč鹥ą╝ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ąĖą╝ąĄčéčī ą╝ąĄąČą┤čāąĮą░čĆąŠą┤ąĮčŗą╣ čüąĄčĆčéąĖčäąĖą║ą░čé, ą░ ąĘą░čÅą▓ą║ą░ ąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠčé ąĖą╝ąĄąĮąĖ ąÉą┤ą╝ąĖąĮąĖčüčéčĆą░čåąĖąĖ čüą▓čÅąĘąĖ ąĀąŠčüčüąĖąĖ.
ąĪčéą░ąĮąŠą▓ąĖčéčüčÅ čÅčüąĮąŠą╣ ą▓ą░ąČąĮąŠčüčéčī čĆąĄčłąĄąĮąĖčÅ ą┤ą░ąĮąĮąŠą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĮą░ ą│ąŠčüčāą┤ą░čĆčüčéą▓ąĄąĮąĮąŠą╝ čāčĆąŠą▓ąĮąĄ:
ŌĆó čü ąŠą┤ąĮąŠą╣ čüč鹊čĆąŠąĮčŗ ŌĆō ą┐ąŠčüč鹊čÅąĮąĮčŗą╣ čĆąŠčüčé ąŠą▒čŖąĄą╝ąŠą▓ čüą┐čāčéąĮąĖą║ąŠą▓čŗčģ čāčüą╗čāą│ čā ąĮą░čü ą▓ čüčéčĆą░ąĮąĄ (ą▓ čüčĆąĄą┤ąĮąĄą╝ ąĮą░ 15-20% ą▓ ą│ąŠą┤), ą║ą╗čÄč湥ą▓ą░čÅ čĆąŠą╗čī čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čüą▓čÅąĘąĖ ą▓ č乥ą┤ąĄčĆą░ą╗čīąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ č鹥ą╗ąĄą▓ąĖąĘąĖąŠąĮąĮąŠą│ąŠ ą▓ąĄčēą░ąĮąĖčÅ, čüčéčĆąĄą╝ąĖč鹥ą╗čīąĮčŗą╣ čĆąŠčüčé čćąĖčüą╗ą░ ą║ąŠčĆą┐ąŠčĆą░čéąĖą▓ąĮčŗčģ ąĖ ą▓ąĄą┤ąŠą╝čüčéą▓ąĄąĮąĮčŗčģ čüąĄč鹥ą╣ VSAT (ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ą▓ čĆą░ą╝ą║ą░čģ ąĮą░čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą┐čĆąŠąĄą║č鹊ą▓);
ŌĆó čü ą┤čĆčāą│ąŠą╣ ŌĆō ą┐ąŠčćčéąĖ ą┐ąŠą╗ąĮą░čÅ ąĘą░ą│čĆčāąĘą║ą░ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą│ąŠ čĆąĄčüčāčĆčüą░ čā ąĮą░čåąĖąŠąĮą░ą╗čīąĮčŗčģ ąŠą┐ąĄčĆą░č鹊čĆąŠą▓.
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čüą▓čÅąĘąĖ ą┐ąŠ čĆąĄčéčĆą░ąĮčüą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā č湥čĆąĄąĘ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮčŗąĄ čüą┐čāčéąĮąĖą║ąĖ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗čā ą┤ąŠčüčéą░č鹊čćąĮąŠ čģąŠčĆąŠčłąŠ ą┐čĆąŠčĆą░ą▒ąŠčéą░ąĮą░ ąĖ ą┤ąŠą▓ąĄą┤ąĄąĮą░ ą┤ąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ [1 ŌĆō 4]. ąÆ ąĘą░čĆčāą▒ąĄąČąĮąŠą╣ ą╗ąĖč鹥čĆą░čéčāčĆąĄ čŹčéą░ č鹥čģąĮąŠą╗ąŠą│ąĖčÅ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ "ą│ąĄąŠą╗ąŠą║ą░čåąĖčÅ", č鹊 ąĄčüčéčī ą▒čāą║ą▓ą░ą╗čīąĮąŠ -ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą│ąĄąŠą│čĆą░čäąĖč湥čüą║ąŠą│ąŠ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ. ąÆ čüčāčēąĄčüčéą▓čāčÄčēąĖčģ č鹥čģąĮąŠą╗ąŠą│ąĖčÅčģ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ ąĖą╗ąĖ ą│ąĄąŠą╗ąŠą║ą░čåąĖąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮąŠą╣ ąŠčĆą▒ąĖč鹥 ą┤ą▓ą░ ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čüą┐čāčéąĮąĖą║ąŠą▓ čüą▓čÅąĘąĖ, ąŠčéčüč鹊čÅčēąĖčģ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą│čĆą░ą┤čāčüąŠą▓. ą¤čĆąĖč湥ą╝ ąĘąŠąĮą░ą╗čīąĮčŗąĄ, čćą░čüč鹊čéąĮčŗąĄ ąĖ ą┐ąŠą╗čÅčĆąĖąĘą░čåąĖąŠąĮčŗąĄ ą┐ą╗ą░ąĮčŗ čĆąĄčéčĆą░ąĮčüą╗čÅč鹊čĆąŠą▓ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüą┐čāčéąĮąĖą║ąŠą▓, čāčćą░čüčéą▓čāčÄčēąĖčģ ą▓ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅčģ, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąĖą╝ąĖ, čćč鹊 ą┤ą░ą╗ąĄą║ąŠ ąĮąĄ ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ. ąĀąŠčüčüąĖą╣čüą║ąĖąĄ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ [5 ŌĆō 7] ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐čĆąŠą▓ąŠą┤ąĖčéčī čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖčÄ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░. ą¤čĆąĖ čŹč鹊ą╝ ą┤ąŠą╗ąČąĄąĮ čüąŠą▒ą╗čÄą┤ą░čéčīčüčÅ ą┐čĆąĖąĮčåąĖą┐ čüąŠąĘą┤ą░ąĮąĖčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗčģ ą┐čĆąŠą▒ą╗ąĄą╝ ąŠą▒čŖąĄą║čéčā ąĘą░čēąĖčéčŗ čüąŠ čüč鹊čĆąŠąĮčŗ ąĘą░čēąĖčéąĮąŠą╣ čüąĖčüč鹥ą╝čŗ. ąśčüčģąŠą┤čÅ ąĖąĘ čŹč鹊ą│ąŠ ą┐čĆąĖąĮčåąĖą┐ą░, ą╝ąŠąČąĮąŠ čüč乊čĆą╝čāą╗ąĖčĆąŠą▓ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ąŠą▒čēąĖąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ:
1. ąöą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čéą░ą║ąŠą╣ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĄčüč鹥čüčéą▓ąĄąĮąĮčŗąĄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ 菹▓ąŠą╗čÄčåąĖąĖ (čŹč乥ą╝ąĄčĆąĖą┤čŗ) ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą╣ ąŠčĆą▒ąĖčéą░ą╗čīąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ. ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čüą┐čāčéąĮąĖą║ąŠą╝ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ą╝ą░ąĮąĄą▓čĆąŠą▓ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ.
2. ąöąŠą╗ąČąĮą░ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčīčüčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąŠą▓ąĄą┤ąĄąĮąĖčÅ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░.
3. ą¤čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą╝ąĄč鹊ą┤ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ ą░ąĮą░ą╗ąĖąĘą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čĆąĄčéčĆą░ąĮčüą╗ąĖčĆčāąĄą╝čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓. ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ąŠą║ą░ąĘčŗą▓ą░čéčī ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ čĆą░ą▒ąŠčéčā čüąĄč鹥ą╣ čüą▓čÅąĘąĖ.
4. ąöą╗čÅ čāč鹊čćąĮąĄąĮąĖčÅ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ą░ą╗ą╗ąĖčüčéąĖč湥čüą║ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĖąĘ čåąĄąĮčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąĄč鹊ą╝ ąĖ ą┤ą░ąĮąĮčŗąĄ ąŠ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ ą│čĆčāą┐ą┐čŗ ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ą┤ą░ąĮąĮąŠą╣ čüąĄčéąĖ.
ąóąŠčćąĮąŠčüčéčī ą┐ąŠą┤ą┤ąĄčƹȹ░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąŠčĆą▒ąĖčéčŗ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ čüą▓čÅąĘąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé 0,05...0,1┬░ ą┐ąŠ ą┤ąŠą╗ą│ąŠč鹥 ąĖ ąĮą░ą║ą╗ąŠąĮąĄąĮąĖčÄ. ąÆ ą╗ąĖąĮąĄą╣ąĮčŗčģ ą▓ąĄą╗ąĖčćąĖąĮą░čģ čŹč鹊 ą▒čāą┤ąĄčé čüąŠčüčéą░ą▓ą╗čÅčéčī 10... 100 ą║ą╝ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąŠą╝ąĖąĮą░ą╗ą░ ąŠčĆą▒ąĖčéą░ą╗čīąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ, čćč鹊 čģą░čĆą░ą║č鹥čĆąĮąŠ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ čüą▓čÅąĘąĖ.
ąĀą░ąĘąĮąĄčüąĄąĮąĮčŗąĄ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ąŠčĆą▒ąĖčéą░ą╗čīąĮčŗąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüą┐čāčéąĮąĖą║ąŠą▓ čüą╗čāąČą░čé ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗą╝ąĖ č鹊čćą║ą░ą╝ąĖ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮčŗčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖą╗ąĖ ą║ąŠąĮąĄčćąĮčŗą╝ąĖ č鹊čćą║ą░ą╝ąĖ čüč鹥čĆąĄąŠą▒ą░ąĘčŗ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮąŠ-čĆą░ąĘąĮąŠčüčéąĮčŗčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┐ąŠ čüąĖą│ąĮą░ą╗čā, čĆąĄčéčĆą░ąĮčüą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā č湥čĆąĄąĘ čŹč鹊čé čüą┐čāčéąĮąĖą║ ąŠčé ąĖčüą║ąŠą╝ąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ąĖąĘą╗čāč湥ąĮąĖčÅ.
ą×ą┐ąĄčĆą░č鹊čĆčŗ ą╝ąŠą│čāčé čüąŠąĘą┤ą░ą▓ą░čéčī ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÅ čāąČąĄ ąĖą╝ąĄčÄčēąĄąĄčüčÅ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ. ąØą░ čĆąĖčü. 1 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆą░ čéą░ą║ąŠą╣ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ, ą║ąŠč鹊čĆą░čÅ čüąŠčüč鹊ąĖčé ąĖąĘ čéčĆąĄčģ ąŠčüąĮąŠą▓ąĮčŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓, čāąČąĄ ąĖą╝ąĄčÄčēąĖčģčüčÅ ą▓ čüąĖčüč鹥ą╝ą░čģ čüą▓čÅąĘąĖ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąĄč鹊ą╝:
ŌĆó čåąĄąĮčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąĄč鹊ą╝ (ą”ąŻą¤);
ŌĆó ą│čĆčāą┐ą┐ą░ ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣ (4 ŌĆō 7 čüčéą░ąĮčåąĖą╣) ąĖąĘ čćąĖčüą╗ą░ ą▓čģąŠą┤čÅčēąĖčģ ą▓ čüąĖčüč鹥ą╝čā;
ŌĆó čåąĄąĮčéčĆą░ą╗čīąĮą░čÅ ąĘąĄą╝ąĮą░čÅ čüčéą░ąĮčåąĖčÅ (ą”ąŚąĪ) čüąĖčüč鹥ą╝čŗ čü ą░ąĮč鹥ąĮąĮąŠą╣ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒ąŠą╗čīčłąŠą╣ ą░ą┐ąĄčĆčéčāčĆčŗ, ą┤ąŠąŠčüąĮą░čēąĄąĮąĮą░čÅ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮčŗą╝ąĖ ą╝ąŠą┤ąĄą╝ą░ą╝ąĖ.
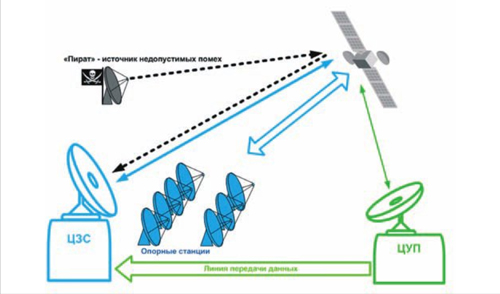
ąĀąĖčü.1. ąÉčĆčģąĖč鹥ą║čéčāčĆą░
ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ-ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ
ąöą░ąĮąĮčŗąĄ čĆą░ą┤ąĖąŠą║ąŠąĮčéčĆąŠą╗čÅ ąŠčĆą▒ąĖčéčŗ (ąĀąÜą×) ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąĖąĘ ą”ąŻą¤ ąĮą░ ą”ąŚąĪ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĖą╗ąĖ ą▓ ą░čĆčģąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čŹčéąĖčģ ą┤ą░ąĮąĮčŗčģ ą▓čŗčćąĖčüą╗čÅčÄčéčüčÅ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮčŗąĄ čéčĆąĄčģą╝ąĄčĆąĮčŗąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ č鹊č湥ą║ ąĖą╗ąĖ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ čüč鹥čĆąĄąŠą▒ą░ąĘ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ čüą▓čÅąĘąĖ. ąōčĆčāą┐ą┐ą░ ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣, ą▓čģąŠą┤čÅčēąĖčģ ą▓ čüąĖčüč鹥ą╝čā, ą│ąĄąŠą│čĆą░čäąĖč湥čüą║ąĖąĄ (ą│ąĄąŠą┤ąĄąĘąĖč湥čüą║ąĖąĄ) ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą║ąŠč鹊čĆčŗčģ ąĖąĘą▓ąĄčüčéąĮčŗ čü ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ č鹊čćąĮąŠčüčéčīčÄ, ąŠą▒čĆą░ąĘčāąĄčé čüąĖčüč鹥ą╝čā ąŠą┐ąŠčĆąĮčŗčģ čüčéą░ąĮčåąĖą╣ ąĖą╗ąĖ čĆą░ą┤ąĖąŠą╝ą░čÅą║ąŠą▓. ąĪ ąĖčģ ą┐ąŠą╝ąŠčēčīčÄ čĆąĄčłą░ąĄčéčüčÅ ąĘą░ą┤ą░čćą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą┐čĆą░ą▓ąŠą║ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÜąŠąŠčĆą┤ąĖąĮą░čéčŗ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆčāąĄą╝čŗčģ čüčéą░ąĮčåąĖą╣ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ ą┐čāč鹥ą╝ čåąĖčäčĆąŠą▓ąŠą╣ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ-ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ [2, 7, 8] ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (ąŠą│ąĖą▒ą░čÄčēąĄą╣) čĆąĄčéčĆą░ąĮčüą╗ąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ą┤ą░ąĮąĮčŗą╝ąĖ ąĀąÜą×. ąŁč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą║ą░ą║ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą╝ą░čüčłčéą░ą▒ąĄ ą▓čĆąĄą╝ąĄąĮąĖ, čéą░ą║ ąĖ ą▓ ą░čĆčģąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ąĀą░ąĘąĮąĖčåą░ ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąŠą┐ąŠčĆąĮčŗčģ čüčéą░ąĮčåąĖą╣ ąĖ ąĖčģ ą░ą┐čĆąĖąŠčĆąĖ ąĖąĘą▓ąĄčüčéąĮčŗčģ ą│ąĄąŠą│čĆą░čäąĖč湥čüą║ąĖčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé čüąŠčüčéą░ą▓ąĖčé ą┐ąŠą┐čĆą░ą▓ą║čā, ą║ąŠč鹊čĆčāčÄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāč湥čüčéčī ą┐čĆąĖ čĆąĄčłąĄąĮąĖąĖ ąĘą░ą┤ą░čćąĖ ą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ "ą┐ąĖčĆą░čéčüą║ąŠą╣" čüčéą░ąĮčåąĖąĖ. ą£ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠąĄ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ą╗čÄč湥ą▓čŗčģ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆčÅą╝ąŠą╣ čĆąĄčéčĆą░ąĮčüą╗čÅčåąĖąĖ ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąĄąĮąĮčŗąĄ ąŠčåąĄąĮą║ąĖ ąĖčģ ą░ą╗ą│ąŠčĆąĖčéą╝ąĖč湥čüą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ ąĖ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą┤ąŠčüčéąĖąČąĖą╝ąŠą╣ ą┐ąŠą│čĆąĄčłąĮąŠčüčéąĖ ą┐čĆąĖ ą▓čŗčÅą▓ą╗ąĄąĮąĖąĖ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐ąŠą╗ąĄąĘąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖ ą▓ąĮąĄčüąĖčüč鹥ą╝ąĮčŗčģ ą┐ąŠą╝ąĄčģ. ąÉą╗ą│ąŠčĆąĖčéą╝ąĖč湥čüą║ą░čÅ ąŠčłąĖą▒ą║ą░ čåąĄą╗ąĄčāą║ą░ąĘą░ąĮąĖčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą░ą╗čīąĮčŗčģ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĀąÜą× čüą┐čāčéąĮąĖą║ą░ čüąĄą╝ąĄą╣čüčéą▓ą░ "ą»ą╝ą░ą╗" (90┬░ ą▓.ą┤.) ąĖą╗ąĖ čüą┐čāčéąĮąĖą║ą░ čüąĄą╝ąĄą╣čüčéą▓ą░ "ąŁą║čüą┐čĆąĄčüčü" (40┬░ ą▓.ą┤.) ąĮąĄ ą┐čĆąĄą▓čŗčłą░ąĄčé ┬▒(0,75...1,25x1,5...2,5) ą║ą╝ ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą╗ąŠą║ą░ą╗čīąĮčŗą╝ čĆą░čüčģąŠąČą┤ąĄąĮąĖąĄą╝ ą│ąĄąŠą┤ąĄąĘąĖč湥čüą║ąĖčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąŠą▒čŖąĄą║čéą░ ąĮą░ č鹥čĆčĆąĖč鹊čĆąĖąĖ ąĀąŠčüčüąĖąĖ čü ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéčīčÄ ą┐čĆąĖąĮčÅč鹊ą╣ ą╝ąŠą┤ąĄą╗ąĖ ąŚąĄą╝ą╗ąĖ.
ą¤čĆąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝čŗčģ ą┐ą░čĆčåąĖą░ą╗čīąĮčŗčģ ąŠčłąĖą▒ą║ą░čģ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠčåąĄą┤čāčĆ ą┐čĆąĄą┤ą╗ąŠąČąĄąĮąĮčŗčģ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ ąĮą░ą▓ąĖą│ą░čåąĖąĖ-ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ ąĖčüą║ąŠą╝ąŠą│ąŠ ąŠą▒čŖąĄą║čéą░ ąĖ čü ą▓ąĮąĄčüąĄąĮąĖąĄą╝ ą┐ąŠą┐čĆą░ą▓ąŠą║ ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ ąŠą┐ąŠčĆąĮčŗčģ čüčéą░ąĮčåąĖą╣ (čĆą░ą┤ąĖąŠą╝ą░čÅą║ąŠą▓) ąĘąŠąĮą░ ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠčüčéąĖ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čåąĄą╗ąĖ ąĮą░ ą╝ąĄčüčéąĮąŠčüčéąĖ ą┐čĆąŠą│ąĮąŠąĘąĖčĆčāąĄčéčüčÅ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 3,5...7x5...25 ą║ą╝. ąŻąČąĄ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮčŗ ą╝ąĄč鹊ą┤čŗ ąĖąĮč鹥čĆą┐ąŠą╗čÅčåąĖąĖ ąĖ ą║ąŠčĆčĆąĄą║čåąĖąĖ ąŠčłąĖą▒ąŠą║ ąĮą░ą▓ąĖą│ą░čåąĖąĖ-ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ą░ čéą░ą║ąČąĄ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ ąŠą▒čŖąĄą║čéą░. ąĀą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ ą╝ąĄč鹊ą┤čŗ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ąĖ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąĖčüą║ąŠą╝čŗčģ ąŠą▒čŖąĄą║č鹊ą▓ ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ ą│čĆčāą┐ą┐čŗ ąĖąĘą▓ąĄčüčéąĮčŗčģ ąŠą┐ąŠčĆąĮčŗčģ čüčéą░ąĮčåąĖą╣ čüąĖčüč鹥ą╝čŗ čüą▓čÅąĘąĖ. ąōą╗ą░ą▓ąĮčŗą╣ čĆąĄąĘčāą╗čīčéą░čé ą┐čĆąŠą▓ąĄą┤ąĄąĮąĮčŗčģ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖą╣ ŌĆō ą┐čĆąŠą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĖ ą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ čüčéą░ąĮčåąĖą╣ č湥čĆąĄąĘ ąŠą┤ąĖąĮąŠčćąĮčŗą╣ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮčŗą╣ čüą┐čāčéąĮąĖą║ čüą▓čÅąĘąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą░ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čĆą░ą┤ąĖąŠą║ąŠąĮčéčĆąŠą╗čÅ ąŠčĆą▒ąĖčéčŗ ąĖ čŹč乥ą╝ąĄčĆąĖą┤ ąĄą│ąŠ ą┐ąŠą╗ąĄčéą░ ą▓ ąŠą║čĆąĄčüčéąĮąŠčüčéąĖ ąĮąŠą╝ąĖąĮą░ą╗ą░ ąŠčĆą▒ąĖčéą░ą╗čīąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ čü ą╗čÄą▒ąŠą╣ ąĘą░ą┤ą░ąĮąĮąŠą╣ ą┤ąŠą╗ą│ąŠč鹊ą╣.
ąĪčāč鹊čćąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤čŗ čüą┐čāčéąĮąĖą║ą░ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĖ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮčŗ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ąĀąÜą× čüą┐čāčéąĮąĖą║ąŠą▓ čüąĄą╝ąĄą╣čüčéą▓ą░ "ą»ą╝ą░ą╗" ąĖ "ąŁą║čüą┐čĆąĄčüčü". ąØą░ čĆąĖčüčāąĮą║ą░čģ 2ą░ ąĖ 26 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą░ąĮąĮčŗąĄ ąĀąÜą× čüą┐čāčéąĮąĖą║ą░ ą┐ąŠ ą▓čŗčüąŠč鹥 (R), čłąĖčĆąŠč鹥 (F) ąĖ ą┤ąŠą╗ą│ąŠč鹥 (L), ą░ čéą░ą║ąČąĄ ąĄą│ąŠ čüčāč鹊čćąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤čŗ.
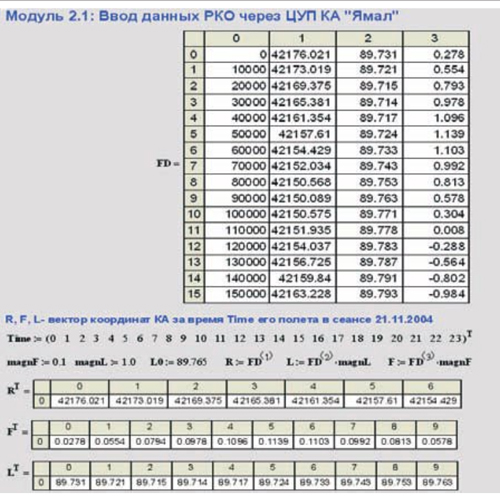
ąĀąĖčü. 2ą░. ąöą░ąĮąĮčŗąĄ ąĀąÜą×
ą┐ąŠ ą▓čŗčüąŠč鹥 R, čłąĖčĆąŠč鹥 F ąĖ ą┤ąŠą╗ą│ąŠč鹥 L
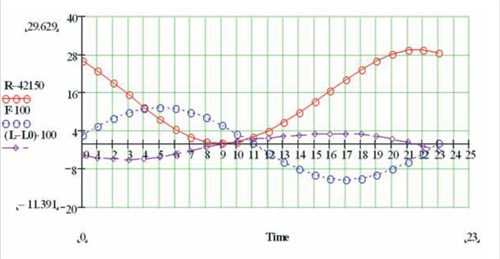
ąĀąĖčü.2ą▒. ąĪčāč鹊čćąĮčŗąĄ
čŹč乥ą╝ąĄčĆąĖą┤čŗ čüą┐čāčéąĮąĖą║ą░
ąóčĆąĄčģą╝ąĄčĆąĮą░čÅ ąĮą░ą▓ąĖą│ą░čåąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░
ą¤čĆąĖąĮčåąĖą┐ ąĮą░ą▓ąĖą│ą░čåąĖąĖ [10] čüąĖčüč鹥ą╝ąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ ą▓ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝ąŠą╣
čüąĖčüč鹥ą╝ąĄ ą░ąĮą░ą╗ąŠą│ąĖč湥ąĮ čüąĖčüč鹥ą╝ą░ą╝ ąōąøą×ąØąÉąĪąĪ/GPS ąĖ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅčģ ą╝ąĮąŠąČąĄčüčéą▓ą░
ąĮą░ą║ą╗ąŠąĮąĮčŗčģ ą┤ą░ą╗čīąĮąŠčüč鹥ą╣ SRI, SR2, SR3 ąĖ čé.ą┤. ąŠą▒čŖąĄą║čéą░ ą£ (čģ, čā, z) ą┤ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ,
ąĮą░ą┐čĆąĖą╝ąĄčĆ, 3 ŌĆō 4 č鹊č湥ą║ čŹč乥ą╝ąĄčĆąĖą┤ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ čü ąĖąĘą▓ąĄčüčéąĮčŗą╝ąĖ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ąĖ S1
(X1, Y1, Z1), S2 (X2, Y2, Z2), ąĢ , S4 (X4, Y4, Z4) ąĖ ąĘą░čüąĄčćą║ąĖ ąŠą▒čēąĄą╣ ąĖčüą║ąŠą╝ąŠą╣
č鹊čćą║ąĖ ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čüč乥čĆ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ. ą£ą░č鹥ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čéą░ą║ąĖčģ
ą┤ą░ąĮąĮčŗčģ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé:
1) ą┐ąŠčüčéčĆąŠąĖčéčī
č鹊čćą║čā ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅ (ąĘą░čüąĄčćą║ąĖ) 3-4 ą┐ąŠą╗čāč湥ąĮąĮčŗčģ čüč乥čĆ ą│ąĄąŠą╝ąĄčéčĆąĖč湥čüą║ąŠą│ąŠ ą╝ąĄčüčéą░ č鹊č湥ą║
(ąōą£ąó) čü ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╝ąĖ čĆą░ą┤ąĖčāčüą░ą╝ąĖ SR1, SR2, SR3, ..., SRk ąĖ čåąĄąĮčéčĆą░ą╝ąĖ ą▓ čĆą░ąĘąĮąĄčüąĄąĮąĮčŗčģ
ą┐ąŠąĘąĖčåąĖčÅčģ čüą┐čāčéąĮąĖą║ą░ čüą▓čÅąĘąĖ, ą▓čŗčÅą▓ą╗čÅčÄčēčāčÄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ąŠą▒čŖąĄą║čéą░ ą£ (čģ, čā, z), ą║ą░ą║ ą║ąŠčĆąĄąĮčī čĆąĄčłąĄąĮąĖčÅ čüąĖčüč鹥ą╝čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čéąĮčŗčģ čāčĆą░ą▓ąĮąĄąĮąĖą╣ (1);
2) ą▓ čüąĖčüč鹥ą╝ąĄ ąĖąĘ
ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčĆą░ą▓ąĮąĄąĮąĖą╣ čüč乥čĆ čü čĆą░ą┤ąĖčāčüą░ą╝ąĖ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮčŗčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ SRk ą┤ą╗čÅ ąŠą▒čŖąĄą║č鹊ą▓
ąĘąĄą╝ąĮąŠą│ąŠ ą▒ą░ąĘąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĮąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čāč湥čüčéčī ą┐ąŠą┤čüčéąĖą╗ą░čÄčēčāčÄ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéčī čüč乥čĆčŗ čü
čĆą░ą┤ąĖčāčüąŠą╝ ąŚąĄą╝ą╗ąĖ RE.
ą£ą░č鹥ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ čĆąĄčłąĄąĮąĖąĄ čüąĖčüč鹥ą╝čŗ čāčĆą░ą▓ąĮąĄąĮąĖą╣:
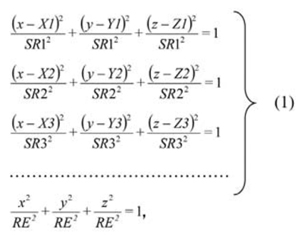
ą│ą┤ąĄ X1, Yl, Z1 ŌĆō ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ I ąŠčĆą▒ąĖčéą░ą╗čīąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ čüą┐čāčéąĮąĖą║ą░;
ąź2, Y2, Z2 ŌĆō ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ II ąŠčĆą▒ąĖčéą░ą╗čīąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ;
ąźąŚ, Y3, Z3 ŌĆō ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ III ąŠčĆą▒ąĖčéą░ą╗čīąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ;
SR1 ŌĆō čĆą░ą┤ąĖčāčü k-ą╣ čüč乥čĆąĖč湥čüą║ąŠą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ ąōą£ąó ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ; RE ŌĆō čĆą░ą┤ąĖčāčü ąĘąĄą╝ąĮąŠą╣ čüč乥čĆčŗ. ąŚą┤ąĄčüčī ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ k-ą╣ ąŠčĆą▒ąĖčéą░ą╗čīąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ čüą┐čāčéąĮąĖą║ą░ čÅą▓ą╗čÅčÄčéčüčÅ čåąĄąĮčéčĆą░ą╝ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čüč乥čĆ ąōą£ąó ąĄą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮąŠą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ. ąÉą╗ą│ąŠčĆąĖčéą╝ąĖč湥čüą║ą░čÅ ąŠčłąĖą▒ą║ą░ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĘąĄą╝ąĮąŠą╣ čüčéą░ąĮčåąĖąĖ, ą▓čģąŠą┤čÅčēąĄą╣ ą▓ čüąĖčüč鹥ą╝čā, ąĖ ąĄąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ (ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ) č湥čĆąĄąĘ č湥čéčŗčĆąĄ (ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ) ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ č鹊čćą║ąĖ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą▒ą╗ąĖąĘą║ą░ ą║ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ ą┤ąĄčüčÅčéą║ą░ą╝ ą╝ąĄčéčĆąŠą▓. ąØą░ą▓ąĖą│ą░čåąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą╣ čüčéą░ąĮčåąĖąĖ ą┐ąŠ 2 ŌĆō 3 ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗą╝ č鹊čćą║ą░ą╝ čüą┐čāčéąĮąĖą║ą░ ąĖ ą┐ąŠą┤čüčéąĖą╗ą░čÄčēąĄą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą▓ąĄą╗ąĖčćąĖąĮčā ą░ą╗ą│ąŠčĆąĖčéą╝ąĖč湥čüą║ąŠą╣ ąŠčłąĖą▒ą║ąĖ čü ą╗ąŠą║ą░ą╗čīąĮčŗą╝ąĖ ą┐ąŠą│čĆąĄčłąĮąŠčüčéčÅą╝ąĖ ą┐čĆąŠčäąĖą╗čÅ ą╝ąŠą┤ąĄą╗ąĖ ąŚąĄą╝ą╗ąĖ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą│ąĄąŠą┤ąĄąĘąĖč湥čüą║ąĖčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą┐ąŠčĆčÅą┤ą║ą░ ┬▒ (1,5...2,5) ą║ą╝. ąøąĖčüčéąĖąĮą│ čĆąĄčłąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čéąĮčŗčģ čāčĆą░ą▓ąĮąĄąĮąĖą╣ ąĮą░ą▓ąĖą│ą░čåąĖąĖ-ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ąĮą░ čĆąĖčü. 3.

ąĀąĖčü. 3. ąøąĖčüčéąĖąĮą│
čĆąĄčłąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ-ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ
ążą░ą║čéąĖč湥čüą║ą░čÅ č鹊čćąĮąŠčüčéčī čéą░ą║ąČąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮąĄą║ąŠąĮčéčĆąŠą╗ąĖčĆčāąĄą╝ąŠą│ąŠ čåąĄąĮčéčĆąŠą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮąŠą│ąŠ ą┤čĆąĄą╣čäą░ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ ą┐ąŠ ąŠčĆą▒ąĖč鹥. ą×ą┤ąĮą░ą║ąŠ čüąŠą▓čĆąĄą╝ąĄąĮąĮą░čÅ č鹥čģąĮąŠą╗ąŠą│ąĖčÅ, ą▓ąŠ-ą┐ąĄčĆą▓čŗčģ, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą┤ąŠčüčéą░č鹊čćąĮčāčÄ č鹊čćąĮąŠčüčéčī ąĀąÜą× (ą┐ąŠčĆčÅą┤ą║ą░ 10 ŌĆō 15 ą╝), ą░ ą▓ąŠ-ą▓č鹊čĆčŗčģ, ą┐čĆąĖą▓ąĮąŠčüąĖą╝ą░čÅ ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī ą╝ąŠąČąĄčé ą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ ąŠą┐ąŠčĆąĮčŗčģ čüčéą░ąĮčåąĖą╣ (čĆą░ą┤ąĖąŠą╝ą░čÅą║ąŠą▓) čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆąĄą│ąĖąŠąĮą░ [10]. ą¤ąŠą╗ąĮąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠąĄ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖą╗ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĄąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ą░ą║ č湥čĆąĄąĘ ąŠą┤ąĖąĮąŠčćąĮčŗą╣ čüą┐čāčéąĮąĖą║ čüą▓čÅąĘąĖ ąĮą░ ąōąĪą× ŌĆō ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĄą│ąŠ 3 ŌĆō 4 ąĖąĘą▓ąĄčüčéąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤, čéą░ą║ ąĖ č湥čĆąĄąĘ ą│čĆčāą┐ą┐čā ą┐ąŠą┤ąŠą▒ąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓.
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠčåąĄą┤čāčĆčŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ, ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĘą░čéčĆą░čéą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĮą░ą║ą╗ąŠąĮąĮąŠą╣ ą┤ą░ą╗čīąĮąŠčüčéąĖ ą┐ąŠ ą╗čÄą▒čŗą╝ 3 ŌĆō 4 ą┐ąŠąĘąĖčåąĖčÅą╝ ą│čĆčāą┐ą┐čŗ čüą┐čāčéąĮąĖą║ąŠą▓ ŌĆō ąŠčé ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą╝ąĖąĮčāčé ą┤ąŠ ą┐ąŠą╗čāčćą░čüą░, ąĖą╗ąĖ ąČąĄ čüčāą╝ą╝ą░čĆąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ ą┐ąŠ 3 ŌĆō 4 ą┐ąŠąĘąĖčåąĖčÅą╝ čŹč乥ą╝ąĄčĆąĖą┤, čćč鹊 čüąŠčüčéą░ą▓ąĖčé ą┐ąŠčĆčÅą┤ą║ą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čćą░čüąŠą▓.
ą£ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą£ (čģ, čā, z) ą▓ąĮąĄčüąĖčüč鹥ą╝ąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░ ŌĆō "ą┐ąĖčĆą░čéčüą║ąŠą╣" čüčéą░ąĮčåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą╝ąĮąŠąČąĄčüčéą▓ą░ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ąĮą░ą║ą╗ąŠąĮąĮčŗčģ ą┤ą░ą╗čīąĮąŠčüč鹥ą╣ DifRl, DifR2, DifR3 ąĖ čé.ą┤. čŹč鹊ą│ąŠ ąŠą▒čŖąĄą║čéą░ ą┤ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąĖąĘą▓ąĄčüčéąĮčŗčģ, ąĮą░ą┐čĆąĖą╝ąĄčĆ čéčĆąĄčģ-č湥čéčŗčĆąĄčģ ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ, ą┐ąŠą┐ą░čĆąĮąŠ ą▓ąĘčÅčéčŗčģ ąŠčĆą▒ąĖčéą░ą╗čīąĮčŗčģ ą┐ąŠąĘąĖčåąĖą╣ ŌĆō čüč鹥čĆąĄąŠą▒ą░ąĘ čüą┐čāčéąĮąĖą║ąŠą▓ ą╝ąĄąČą┤čā č鹊čćą║ą░ą╝ąĖ S1 (X1, Y1, Z1) -S2 (X2, Y2, Z2), S3 (X3, Y3, Z3) -S4 (ąź4, Y4, Z4) ąĖ čé.ą┤. čü čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ąĖ. ąÆ ą║ą░č湥čüčéą▓ąĄ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ čéą░ą║ąĖčģ čüč鹥čĆąĄąŠą▒ą░ąĘ čüą╗čāąČą░čé čüą╝ąĄčēąĄąĮąĮčŗąĄ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čŹč乥ą╝ąĄčĆąĖą┤čŗ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ čüą▓čÅąĘąĖ ą▓ ąŠą║čĆąĄčüčéąĮąŠčüčéąĖ ąĮąŠą╝ąĖąĮą░ą╗ą░ ąĄą│ąŠ ąŠčĆą▒ąĖčéą░ą╗čīąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ. ą£ą░č鹥ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čŹčéąĖčģ ą┤ą░ąĮąĮčŗčģ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ čĆąĄčłąĄąĮąĖąĄ čüąĖčüč鹥ą╝čŗ čāčĆą░ą▓ąĮąĄąĮąĖą╣:
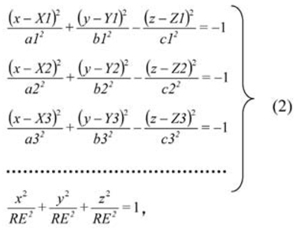
ą│ą┤ąĄ XI, Yl, Z1 ŌĆō ąŚą×-ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ čåąĄąĮčéčĆą░ I čüč鹥čĆąĄąŠą▒ą░ąĘčŗ;
ąź2, Y2, Z2 ŌĆō ąŚąæ-ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ čåąĄąĮčéčĆą░ II čüč鹥čĆąĄąŠą▒ą░ąĘčŗ;
ąźąŚ, Y3, Z3 ŌĆō ąŚąæ-ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ čåąĄąĮčéčĆą░ III čüč鹥čĆąĄąŠą▒ą░ąĘčŗ;
a1, b1, c1 ŌĆō ą┐ą░čĆą░ą╝ąĄčéčĆčŗ I ą│ąĖą┐ąĄčĆą▒ąŠą╗ąĖč湥čüą║ąŠą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ ąōą£ąó; RE ŌĆō čĆą░ą┤ąĖčāčü ąĘąĄą╝ąĮąŠą╣ čüč乥čĆčŗ. ą×ąĮą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čéą░ą║ąČąĄ:
1. ąÆčŗčćąĖčüą╗ąĖčéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ a1, b1, c1 ą║ą░ąČą┤ąŠą╣ I ą│ąĖą┐ąĄčĆą▒ąŠą╗ąĖč湥čüą║ąŠą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ ąōą£ąó ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░.
2. ą¤ąŠčüčéčĆąŠąĖčéčī ąŠą▒čēčāčÄ č鹊čćą║čā ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą│ąĖą┐ąĄčĆą▒ąŠą╗ąĖč湥čüą║ąĖčģ ą┐ąŠą▓ąĄčĆčģąĮąŠčüč鹥ą╣ ąōą£ąó ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░, ą┤ą╗čÅ č湥ą│ąŠ čĆąĄčłąĖčéčī čüąĖčüč鹥ą╝čā čāčĆą░ą▓ąĮąĄąĮąĖą╣ (2) ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĖčģ ąŠą▒čēąĄą│ąŠ ą║ąŠčĆąĮčÅ ŌĆō ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮčŗčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąĖčüą║ąŠą╝ąŠą╣ č鹊čćą║ąĖ ą£ (čģ, čā, z) ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅ čāą║ą░ąĘą░ąĮąĮčŗčģ ą┐ąŠą▓ąĄčĆčģąĮąŠčüč鹥ą╣.
3. ąÆ čüąĖčüč鹥ą╝ąĄ ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčĆą░ą▓ąĮąĄąĮąĖą╣ ą│ąĖą┐ąĄčĆą▒ąŠą╗ąĖč湥čüą║ąĖčģ ą┐ąŠą▓ąĄčĆčģąĮąŠčüč鹥ą╣ ą┤ą╗čÅ ąĘąĄą╝ąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░ ą£ (čģ, čā, z) ą╝ąŠąČąĮąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čāč湥čüčéčī ą╝ąŠą┤ąĄą╗čī ąŚąĄą╝ą╗ąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ čüč乥čĆčā čü čĆą░ą┤ąĖčāčüąŠą╝ ąŚąĄą╝ą╗ąĖ RE.
ąÆ čģąŠą┤ąĄ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī čüč乥čĆąĖč湥čüą║ą░čÅ čüąĖčüč鹥ą╝ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé (ąĪąĪąÜ) ŌĆō ą┤ą╗čÅ ą╝ąŠą┤ąĄą╗ąĖ ąŚąĄą╝ą╗ąĖ ąĖ ą┤ąĄą║ą░čĆč鹊ą▓ą░ ą│ąĄąŠčåąĄąĮčéčĆąĖč湥čüą║ą░čÅ čüąĖčüč鹥ą╝ą░ (ąōąĪąÜ) ŌĆō ą┤ą╗čÅ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĖ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ. ą¤čĆąĖ čŹč鹊ą╝ ą▓ąŠąĘąĮąĖą║ą░ąĄčé čüąĖčüč鹥ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠčłąĖą▒ą║ą░ čĆą░čüčģąŠąČą┤ąĄąĮąĖčÅ ą│ąĄąŠą┤ąĄąĘąĖč湥čüą║ąĖčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ ąĘąĄą╝ąĮąŠą╣ čüč乥čĆčŗ, ą╝ąŠą┤čāą╗čī ą║ąŠč鹊čĆąŠą╣ ą╝ąŠąČąĄčé ą┤ąŠčüčéąĖą│ą░čéčī 8 ą║ą╝. ąöą╗čÅ ąĄąĄ ą╝ąĖąĮąĖą╝ąĖąĘą░čåąĖąĖ ą┐čĆąĄą┤ą┐ąŠčćčéąĖč鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ąŠą┤ąĄą╗čī čĆąĄč乥čĆąĄąĮčå-菹╗ą╗ąĖą┐čüąŠąĖą┤ą░ ąŚąĄą╝ą╗ąĖ čü ą┐ąŠą┐čĆą░ą▓ą║ą░ą╝ąĖ ąÜčĆą░čüąŠą▓čüą║ąŠą│ąŠ [9]. ąøąĖčüčéąĖąĮą│ čĆąĄčłąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čéąĮčŗčģ čāčĆą░ą▓ąĮąĄąĮąĖą╣ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ąĮą░ čĆąĖčü. 4. ą¤ąŠą╗čāčćą░ąĄą╝čŗą╣ ą▓ąĄą║č鹊čĆ ą╗ąĖąĮąĄą╣ąĮčŗčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą£ (čģ, čā, z) čüą╗ąĄą┤čāąĄčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░čéčī ąĖąĘ ąōąĪąÜ ą▓ ą│ąĄąŠą│čĆą░čäąĖč湥čüą║ąĖąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ąĪąĪąÜ ąĖčüą║ąŠą╝ąŠą╣ č鹊čćą║ąĖ ą£ (μ, Θ, ρ) ą╝ąŠą┤ąĄą╗ąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮą░ąĮąŠčüčÅčéčüčÅ ąĮą░ ą│ą╗ąŠą▒čāčü ąĖą╗ąĖ ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ ą║ą░čĆčéčā ąŚąĄą╝ą╗ąĖ. ąÉą╗ą│ąŠčĆąĖčéą╝ąĖč湥čüą║ą░čÅ č鹊čćąĮąŠčüčéčī ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą┐ąĄą╗ąĄąĮą│čāąĄą╝ąŠą│ąŠ ąŠą▒čŖąĄą║čéą░ ą£ (čģ, čā, z) ą┐ąŠ čĆą░ąĘąĮąĄčüąĄąĮąĮčŗą╝ ą┐ąŠąĘąĖčåąĖčÅą╝ ą┤ą▓čāčģ-čéčĆąĄčģ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ čü ąŠčĆą▒ąĖčéą░ą╗čīąĮčŗą╝ čĆą░ąĘąĮąŠčüąŠą╝ 1-3┬░ ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ąĘąŠąĮąĄ ąĖčģ čüąŠą▓ą╝ąĄčüčéąĮąŠą╣ čĆą░ą┤ąĖąŠą▓ąĖą┤ąĖą╝ąŠčüčéąĖ (18x18┬░) ąŠą│čĆą░ąĮąĖč湥ąĮą░ ąŠčłąĖą▒ą║ąŠą╣ čćąĖčüą╗ąĄąĮąĮąŠą│ąŠ čĆąĄčłąĄąĮąĖčÅ (2) ąĖ ąĖą╝ąĄąĄčé ą┐ąŠčĆčÅą┤ąŠą║ 150 ŌĆō 750 ą╝. ąóą░ą║ąĖąĄ ąČąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ą┤ąŠčüčéąĖą│ą░čÄčéčüčÅ ąĖ ą┐ąŠ čüąĄą╝ąĄą╣čüčéą▓čā čüą╝ąĄčēąĄąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░. ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠčåąĄą┤čāčĆčŗ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ, ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝, čüčāą╝ą╝ą░čĆąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą┤ą░ą╗čīąĮąŠčüč鹥ą╣:
ŌĆó ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ čüč鹥čĆąĄąŠą▒ą░ąĘ čü čĆą░ąĘą┤ąĄą╗čīąĮčŗą╝ąĖ ąŠčĆą▒ąĖčéą░ą╗čīąĮčŗą╝ąĖ ą┐ąŠąĘąĖčåąĖčÅą╝ąĖ čüąŠąĘą▓ąĄąĘą┤ąĖčÅ ąĖąĘ ą┤ą▓čāčģ ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čüą┐čāčéąĮąĖą║ąŠą▓ ŌĆō ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ąĄčüčÅčéą║ąŠą▓ ą╝ąĖąĮčāčé;
ŌĆó ą┤ą╗čÅ čŹč乥ą╝ąĄčĆąĖą┤ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ ŌĆō ą┐ąŠčĆčÅą┤ą║ą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čćą░čüąŠą▓.
ąÆčŗą┐ąŠą╗ąĮąĄąĮąĮčŗąĄ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐čĆąĄą┤ą╗ąŠąČąĖčéčī ąŠčüąĮąŠą▓ąĮčŗąĄ čüąĖčüč鹥ą╝ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗. 1.
ąóą░ą▒ą╗ąĖčåą░ 1. ą×čüąĮąŠą▓ąĮčŗąĄ
ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ-ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ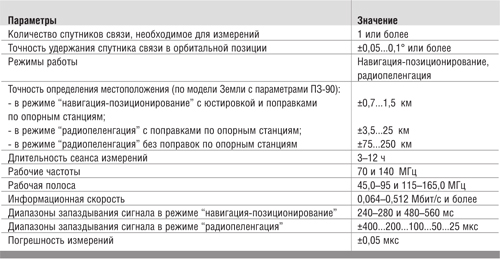
ąĪą┐ąĖčüąŠą║ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą▓ čüąŠčüčéą░ą▓ąĄ ą”ąŚąĪ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ ą┤ą╗čÅ ą┤ąŠąŠčüąĮą░čēąĄąĮąĖčÅ čüąĖčüč鹥ą╝čŗ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čüą▓čÅąĘąĖ ą┐ąŠą┤čüąĖčüč鹥ą╝ąŠą╣ ąĮą░ą▓ąĖą│ą░čåąĖąĖ-ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čĆą░ą┤ąĖąŠą╗ąŠą║ą░čåąĖąĖ, čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠąĘąĖčåąĖą╣:
1) ąŠą┤ąĮąŠą║ą░ąĮą░ą╗čīąĮčŗą╣ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮčŗą╣ ą╝ąŠą┤ąĄą╝ (ąöą£ą£) ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĮą░ą║ą╗ąŠąĮąĮąŠą╣ ą┤ą░ą╗čīąĮąŠčüčéąĖ;
2) ą╝ąĮąŠą│ąŠą║ą░ąĮą░ą╗čīąĮčŗą╣ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮąŠ-čĆą░ąĘąĮąŠčüčéąĮčŗą╣ ą╝ąŠą┤ąĄą╝ (ąöąĀą£) ą┤ą╗čÅ ą│čĆčāą┐ą┐ąŠą▓čŗčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┤ą░ą╗čīąĮąŠčüčéąĖ;
3) čüčéą░ąĮą┤ą░čĆčé čćą░čüč鹊čéčŗ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ čü č鹊čćąĮąŠčüčéčīčÄ ąĮąĄ čģčāąČąĄ ε = 10-12;
4) ą║ąŠą╝ą┐čīčÄč鹥čĆąĮčŗą╣ čüąĄčĆą▓ąĄčĆ (ą┐čĆąŠč乥čüčüąĖąŠąĮą░ą╗čīąĮčŗą╣ ą¤ąÜ) ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ąĖ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠčåąĄą┤čāčĆ ą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ;
5) ą┐ą░ą║ąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ-ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ (ą¤ą£ą×) ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ ąĀąÜą× čüą┐čāčéąĮąĖą║ą░, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣ ąĖ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ą░ąĘ ą┤ą░ąĮąĮčŗčģ.
ą×čĆąĖą│ąĖąĮą░ą╗čīąĮčŗą╝ąĖ ą▓ čŹč鹊ą╝ ą┐ąĄčĆąĄčćąĮąĄ čÅą▓ą╗čÅčÄčéčüčÅ ą┐čĆąĖą▒ąŠčĆčŗ ąöą£ą£, ąöąĀą£ ąĖ čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ą¤ą£ą×.
ą×čüąĮą░čēąĄąĮąĖąĄ čüąĖčüč鹥ą╝čŗ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čüą▓čÅąĘąĖ ą┐ąŠą┤čüąĖčüč鹥ą╝ąŠą╣ ąĮą░ą▓ąĖą│ą░čåąĖąĖ-ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čĆą░ą┤ąĖąŠą┐ąĄą╗ąĄąĮą│ą░čåąĖąĖ čüąŠąĘą┤ą░ąĄčé ą┤ą╗čÅ ąŠą┐ąĄčĆą░č鹊čĆą░ čüčāčēąĄčüčéą▓ąĄąĮąĮčŗąĄ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ą░. ąĪą░ą╝ąŠąĄ ą│ą╗ą░ą▓ąĮąŠąĄ ŌĆō ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒čŗčüčéčĆąŠ ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠ ą▓čŗčÅą▓ąĖčéčī ąĖčüč鹊čćąĮąĖą║ąĖ ąĮąĄą┐čĆąĄą┤ąĮą░ą╝ąĄčĆąĄąĮąĮčŗčģ ą┐ąŠą╝ąĄčģ ąĖ ąĮąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ąĖ ą▓ąĄčüčéąĖ čü ąĮąĖą╝ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčāčÄ ą▒ąŠčĆčīą▒čā ąĮą░ ą┐čĆą░ą▓ąŠą▓ąŠą╣ ąŠčüąĮąŠą▓ąĄ čü čāčćą░čüčéąĖąĄą╝ ą│ąŠčüčāą┤ą░čĆčüčéą▓ąĄąĮąĮčŗčģ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮčŗčģ ąŠčĆą│ą░ąĮąŠą▓. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠą▒ąŠ ą▓čüąĄčģ ą▓čŗčÅą▓ą╗ąĄąĮąĮčŗčģ ąŠą▒čŖąĄą║čéą░čģ čéą░ą║ąŠą│ąŠ čĆąŠą┤ą░ čüčéą░ąĮąĄčé čģčĆą░ąĮąĖčéčīčüčÅ ą▓ ą▒ą░ąĘąĄ ą┤ą░ąĮąĮčŗčģ, ąĖ ą▓ čüą╗čāčćą░ąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ (ą┐ąŠą▓č鹊čĆąĮąŠąĄ ąĮą░čĆčāčłąĄąĮąĖąĄ) ąŠą▒čŖąĄą║čéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąŠą┐ąĄčĆą░č鹊čĆ ą▒čāą┤ąĄčé čüąŠąĘą┤ą░ą▓ą░čéčī čåąĖčäčĆąŠą▓čŗąĄ ą║ą░čĆčéčŗ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čüčéą░ąĮčåąĖą╣ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čüą▓čÅąĘąĖ ąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ąŠą┐ąĄčĆą░čéąĖą▓ąĮčŗą╣ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄą╝čŗčģ čüčéą░ąĮčåąĖą╣, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ąŠąĘąĖą╝čŗčģ ąĖą╗ąĖ ą║ąŠčĆą░ą▒ąĄą╗čīąĮčŗčģ. ąØą░ą╗ąĖčćąĖąĄ čéą░ą║ąŠą╣ čüąĖčüč鹥ą╝čŗ ą▓ čüčéčĆčāą║čéčāčĆąĄ čåąĄąĮčéčĆą░ą╗čīąĮčŗčģ ąĖą╗ąĖ čĆąĄą│ąĖąŠąĮą░ą╗čīąĮčŗčģ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮčŗčģ ąŠčĆą│ą░ąĮąŠą▓ ą┐ąŠąĘą▓ąŠą╗ąĖčé čĆąĄąĘą║ąŠ ą┐ąŠą▓čŗčüąĖčéčī ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠčüčéčī ą┐ąŠąĖčüą║ą░ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą▓ąĮąĄčüąĖčüč鹥ą╝ąĮąŠą│ąŠ ąĖąĘą╗čāč湥ąĮąĖčÅ ąĖ, čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čĆąĄčłąĖčéčī ąŠą┤ąĮčā ąĖąĘ ą│ą╗ą░ą▓ąĮčŗčģ ąĘą░ą┤ą░čć čŹčéąĖčģ ąŠčĆą│ą░ąĮąŠą▓ ŌĆō ąŠą▒ąĄčüą┐ąĄčćąĖčéčī 菹║čüą┐ą╗čāą░čéą░čåąĖąŠąĮąĮčāčÄ ą│ąŠč鹊ą▓ąĮąŠčüčéčī ąĮą░čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮąŠą│ąŠ čĆąĄčüčāčĆčüą░.
1. Haworth D. P., Smith N. G., Bardelli R., Clement T. Interference localization for Eutelsat satellites ŌĆō the first European transmitter location system, International Journal of satellite communications, Vol. 15, 1997, P. 155-183.
2. C. Privat, L. Sterenberg Interference Detection and Geolocation System, Technical Proposals, Alcatel Alenia Space, 2005.
3. ąÆąĄą╣čåąĄą╗čī ąÆ. ąÆ., ąæąĄą╗ąŠą│ą╗ą░ąĘąŠą▓ ąÆ. ąÆ., ąøąĄą▓ąĖčéą░ąĮ ąæ. ąÉ. ąöąŠą║ą╗ą░ą┤ "ąÜą░ą║ ąĮą░ą╣čéąĖ ąĘą╗ąŠčāą╝čŗčłą╗ąĄąĮąĮąĖą║ą░ ą▓ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čüąĄčéąĖ". ą£ą░č鹥čĆąĖą░ą╗čŗ ą║ąŠąĮč乥čĆąĄąĮčåąĖąĖ icsc'98.
4. ą¤ą░čāč鹊ą▓ ąō. ąÆ. ąÆčŗčÅą▓ą╗ąĄąĮąĖąĄ ąĖ čāčüčéčĆą░ąĮąĄąĮąĖąĄ čĆą░ą┤ąĖąŠą┐ąŠą╝ąĄčģ ą▓ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čüą▓čÅąĘąĖ, ą£ąŠčüą║ą▓ą░, "ąĪą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüą▓čÅąĘčī ąĖ ą▓ąĄčēą░ąĮąĖąĄ", 2008.
5. ąōąĄčĆą░čüąĖą╝ąŠą▓ ąÆ. ąÆ., ąøčÅčģąŠą▓ą║ąĖąĮ ąÉ.ąÉ., ą£ąŠą│čāč湥ą▓ ąÆ. ąś. ąöąŠą║ą╗ą░ą┤ "ąÆčŗčÅą▓ą╗ąĄąĮąĖąĄ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą░ą▒ąŠąĮąĄąĮčéčüą║ąĖčģ ąŚąĪ ą┐čĆąĖ ąĮąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ą┤ąŠčüčéčāą┐ąĄ ą▓ čüą┐čāčéąĮąĖą║ąŠą▓čŗčģ čüąĖčüč鹥ą╝ą░čģ čüą▓čÅąĘąĖ". ą£ą░č鹥čĆąĖą░ą╗čŗ ą║ąŠąĮč乥čĆąĄąĮčåąĖąĖ icsc'98.
6. ą£ąŠą│čāč湥ą▓ ąÆ. ąś. ąöąŠą┐ą┐ą╗ąĄčĆąŠą▓čüą║ą░čÅ ą┐ąĄą╗ąĄąĮą│ą░čåąĖčÅ ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣ č湥čĆąĄąĘ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮčŗą╣ čüą┐čāčéąĮąĖą║ čüą▓čÅąĘąĖ, "ąŁą╗ąĄą║čéčĆąŠčüą▓čÅąĘčī", 2003. Ōä¢1.
7. ą£ąŠą│čāč湥ą▓ ąÆ. ąś. ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮą░čÅ ą┐ąĄą╗ąĄąĮą│ą░čåąĖčÅ ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣ č湥čĆąĄąĘ ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮčŗą╣ čüą┐čāčéąĮąĖą║, "ąŁą╗ąĄą║čéčĆąŠčüą▓čÅąĘčī", 2004. Ōä¢6.
8. ą¤ą░ąĮčīą║ąŠ ąĪ. ą¤., ąĪčāčģąŠčéąĖąĮ ąÆ. ąÆ. ąØąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą▓ čüąĖčüč鹥ą╝čŗ čüą┐čāčéąĮąĖą║ąŠą▓čŗčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, "ąŻčüą┐ąĄčģąĖ čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ čĆą░ą┤ąĖąŠčŹą╗ąĄą║čéčĆąŠąĮąĖą║ąĖ", 2002. Ōä¢4.
9. ą£ą░čłą▒ąĖčå ąø. ą£. ąÜąŠą╝ą┐čīčÄč鹥čĆąĮą░čÅ ą║ą░čĆč鹊ą│čĆą░čäąĖčÅ ąĖ ąĘąŠąĮčŗ čüą┐čāčéąĮąĖą║ąŠą▓ąŠą╣ čüą▓čÅąĘąĖ, "ąĀą░ą┤ąĖąŠ ąĖ ąĪą▓čÅąĘčī", 2000.
10. ąæą░ą║ąĖčéčīą║ąŠ ąĀ. ąÆ.,ąæčāą╗ą░ą▓čüą║ąĖą╣ ąØ. ąó., ąōąŠčĆąĄą▓ ąÉ. ą¤., ąöą▓ąŠčĆą║ąĖąĮ ąÆ. ąÆ. ąĖ ą┤čĆ. ąōąøą×ąØąÉąĪąĪ. ą¤čĆąĖąĮčåąĖą┐čŗ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ąĖ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ą£ąŠčüą║ą▓ą░, "ąĀą░ą┤ąĖąŠč鹥čģąĮąĖą║ą░", 2005.
ą×ą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąŠ: ąĪą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą▓čŗą┐čāčüą║ "ąĪą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüą▓čÅąĘčī ąĖ ą▓ąĄčēą░ąĮąĖąĄ"-2009
ą¤ąŠčüąĄčēąĄąĮąĖą╣: 16999
ąĪčéą░čéčīąĖ ą┐ąŠ č鹥ą╝ąĄ
ąÉą▓č鹊čĆ
| |||
ąÉą▓č鹊čĆ
| |||
ąÉą▓č鹊čĆ
| |||
ąÆ čĆčāą▒čĆąĖą║čā "ąĪą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüą▓čÅąĘčī" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣

